机械手搭载双目相机,手眼标定。
2023-07-11 11:18
求指教如何使用labview实现手眼标定谢谢
2019-04-22 18:24
本帖最后由 lilin0734 于 2017-11-15 20:09 编辑 机器视觉手眼标定
2017-11-06 10:45
这种情况的标定过程实际上和相机和机械手分离的标定方法是一样的,因为相机拍照时,机械手会运动到相机标定的时候的位置,然后相机拍照,得到目标的坐标,再控制机械手,所以简单的相机固定在末端的
2020-07-11 09:57
有个项目要用视觉定位,视觉拍好产品之后,把产品的坐标发送到PLC,PLC再执行定位指令。现在查到的资料都没有涉及这一块,都是讲相机标定,而不是手眼标定。哪位有这方面的资料,怎么用labview实现
2020-05-28 14:42
机械手搭载双目相机,手眼标定。
2023-04-20 16:32

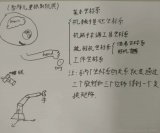
首先,我们要了解一下常规的手眼标定流程是怎么样的。
2023-07-25 16:52

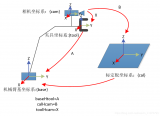
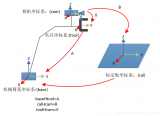
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,
2020-08-28 11:42
在实际控制中,相机检测到目标在图像中的像素位置后,通过标定好的坐标转换矩阵将相机的像素坐标变换到机械手的空间坐标系中,然后根据机械手坐标系计算出各个电机该如何运动,从而控制机械手到达指定位置。这个过程中涉及到了图像标定,图像处理,运动学正逆解,
2023-07-03 15:45

针对机器人运动学正解及相机的外参数标定存在偏差时,基于非线性最优化的手眼标定算法无法确保目标函数收敛到全局极小值的问题,提出基于四元数理论的凸松弛全局最优化手眼
2017-12-03 10:05