
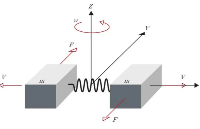
对于在反馈环路中采用MEMS惯性测量单元(IMU)的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。
2016-11-05 03:56
IMU(惯性测量单元,InertialMeasurementUnit)测量物体的角度信息主要依赖于其内部的加速度计和陀螺仪。这两种传感器协同工作,通过特定的算法处理数据
2025-01-21 10:48 Piezoman压电侠 企业号
惯性测量单元Inertial measurement unit,简称IMU,是测量物体三轴姿态角(或角速率)及加速度的装置。陀螺仪和加速度计,是
2019-10-04 17:12
据麦姆斯咨询介绍,惯性测量单元(Inertial Measurement Unit,IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。通常,IMU内部集成3轴陀
2022-09-28 10:32
轨道不平顺检测方法有绝对测量与相对测量两大类,目前应用广泛的是相对测量法。相对测量又分弦测法、惯性基准法、
2021-03-29 14:50

陀螺仪是用来测量角速率的器件,在加速度功能基础上,可以进一步发展,构建陀螺仪。
2019-05-13 10:24

在无线通信系统中,“噪声系数(NF)”或相关的“噪声系数(F)”是用于指定无线电接收器性能的数字。噪声系数值越低,性能越好。本教程更详细地讨论了这个重要参数,并描述了三
2023-03-03 15:20
根据测量误差的性质(或出现的规律),产生的原因,测量误差可分为系统误差、随机误差和粗大误差三类。
2019-11-02 06:12
一、电气测量误差的形式 电气测量误差的形式分为绝对误差、相对误差和引用误差三种。 1、绝对
2023-09-14 11:07
交通运输和工业应用对噪声敏感并且需要低EMI电源解决方案。传统方法通过减慢开关边沿或降低开关频率来控制EMI。这两种方法都会产生不良的影响,例如效率下降,最短接通和关断时间增加,以及需要采用大尺寸的解决方案
2018-08-18 09:23