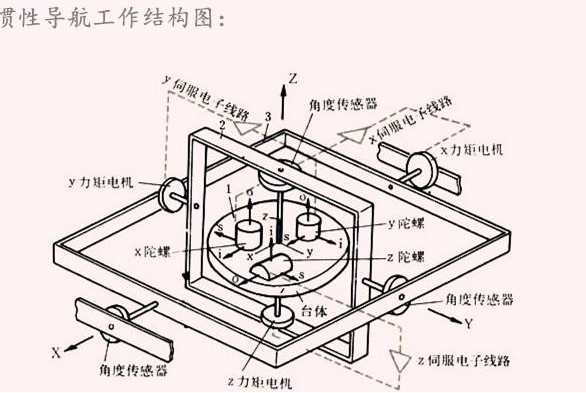
惯性导航系统(INS,Inertial Navigation System)也称作惯性参考系统,是一种不依赖于外部信息、也不向外部辐射能量(如无线电导航那样)的自主式
2018-03-04 09:25

对于在反馈环路中采用MEMS惯性测量单元(IMU)的高性能运动控制系统,传感器对准误差常常是其关键考虑之一。
2016-11-05 03:56
惯性导航系统根据陀螺仪的不同,可分为机电(包含液浮、气浮、静电、 挠性等种类)陀螺仪、光学(包含激光、光纤等种类) 陀螺仪、微机械(MEMS)陀螺仪等类型的惯性导航系统
2018-05-10 17:09
惯性导航(Inertial Navigation)是20 世纪中期发展起来的完自主式的导航技术。通过惯性测量组件(IMU)测量载体相对
2018-03-02 16:23
惯性导航将成为自动驾驶定位信息融合的中心。
2018-10-06 13:11
惯性导航系统 INS( Inertia Navigation System ,以下简称惯导 ) 惯导是一种利用惯性传感器测量载体的比力及角速度信息,并结合给定的初始条件
2018-04-26 09:06

精确和鲁棒的初始化对于视觉惯性里程计(VIO)至关重要,因为不良的初始化会严重降低姿态精度。
2024-11-01 10:16
先来说惯性导航元件(IMU),这是一种可以测量飞行器速度、磁向角和重力加速度的电子器件,融合了加速度计、陀螺仪和磁罗盘。现在惯性导航元件已经用在人机交互领域的
2019-11-29 15:55

传感器未对准通常是在其反馈回路中使用MEMS惯性测量单元(IMU)的高性能运动控制系统的关键考虑因素。对于IMU中的陀螺仪,传感器未对准描述了每个陀螺仪的旋转轴与系统定义的惯性
2023-01-08 20:05

在本文中,我们提出了一种完全分布式的点线协同视觉惯性导航系统。我们通过蒙特卡罗模拟和真实环境数据集,在稠密特征或稀疏特征环境下将所提出的算法与其他四种算法进行了比较。所有结果表明,我们的PL-CVIO优于独立的MSCKF和CVIO。
2024-09-30 14:45