和控制影响鱼类生存生长的环境因素,避免人工判断观察失误或者操作的不及时造成大量鱼类死亡,有效减少人工成本消耗,而且还能降低系统运行维护成本,以适应中小型鱼塘养殖户节约成本的问题。 一、系统总体设计 本鱼塘控制系
2021-10-15 10:28

协调器模块总体设计电路图如下所示 协调器由CC2530、C8051F040、NANDFLASH、DS12887、1602和GSM模块组成。由于普通的51单片机只有1个串口,无法满足设计的要求,所以这里采用C8051F040,C8051F
2012-07-05 14:07

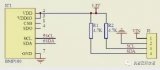
终端节点模块总体设计电路图 终端节点模块由CC2530、按键电路、显示电路和时钟电路等构成。CC2530是TI公司以C51为内核的ZigBee芯片,它支持国际802.15.4标准以及ZigBee、ZigBee PRO和ZigBeeRF4
2012-07-05 14:02

路由器模块总体设计电路图如下所示: 考虑到路由器模块距终端节点模块较近,离协调器模块较远,单独使用CC2530作为路由器模块可能会出现数据的丢失,由于CC2591的传输距离可达1~
2012-07-05 14:05
定义机框工作量大,而且需要考虑产品的迭代升级,产品持续的竞争力,需要设计者具备全流程视野和战略能力以及技术深度和广度,对技术演进的预判能力。因为工作量大,所以繁重;因为对工作能力要求高,所以高级。
2022-06-08 09:51

搬运机器人是一种用于工业运动控制的设备,一般由执行系统、驱动系统和控制系统组成。搬运机器人具有结构简单、成本低廉、维修容易的优点,可以代替人进行工作,把工件由某个地方移向指定的工作位置,或按照工作要求以操纵工件进行加工。下面来了解下搬运机器人工作原理及结构组成。一、搬运机器人的设计原理搬运机器人为可移动门架式结构,手臂承载机构可沿着导轨进行移动,导轨安装与立
2023-10-27 08:07 深圳市科瑞特自动化技术有限公司 企业号
从2021年开始,大部分国内车企都会从自己的纯电动平台开始切换,这个平台的电池部分,大部分都是从原有的VDA355模组切换到了590模组。但是在2019年的年底,随着CTP和基于355电芯双排大模组的提出,改进型的590模组也逐步走上了舞台,其总体设计今天我们来探讨下。
2020-11-10 09:25
针对目前市场的需求,整合市场上单一产品的优点,本文基于机智云平台技术设计了一款智能宠物管理系统。
2022-03-31 14:56

屏蔽是利用屏蔽体来阻挡或减小电磁能传输的一种技术,是抑制电磁干扰的重要手段之一。
2019-08-07 11:24
电动机是将电能转换为机械能的装置,反之,他也具有将旋转机械能转换为电能的发电功能。换言之,伺服电机是一种能量转换装置,可将电能转换为机械能,同时也能通过其反过程来达到制动的目的。
2023-10-26 12:43