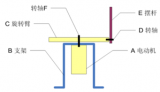
概述 机器人运动系统式一套高复杂性、高耦合性、驱动力小于机体物理自由度的非线性系统,为了实现机器人在空间中稳定的运动姿态控制,本设计把机器人运动系统在空间中的运动形式等
2021-01-08 11:37
从力与运动的角度,阻抗控制实现规律可以总结如下: 1. 力与位移关系:阻抗控制通过建立力与位移之间的关系来实现控制。 这种关系可以使用弹簧-阻尼系统
2023-11-09 16:45
用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人控制系统。
2023-04-17 17:28
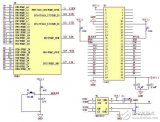
设计了基于COMX和STM32的机器人伺服控制器解决方案。首先介绍了COMX模块的功能及结构,然后设计了基于FSMC的接口电路来
2014-10-17 13:43
机器人控制器是根据指令以及传感信息控制机器人完成一定的动作或作业任务的装置,它是机器人的心脏,决定了
2019-10-14 14:39
机器人的控制系统,就相当于人体的大脑,是机器人的核心组成部分。关于机器人的控制系统有哪些分类呢?
2019-11-04 08:45
随着工业自动化技术的飞速发展,机器人技术作为其中的重要组成部分,其应用范围日益广泛。在机器人的控制系统中,PLC(Programmable Logic Controller,可编程逻辑
2024-06-17 10:50
机器人需要有一个控制系统,用硬件和软件组成一个的控制系统。
2018-07-30 08:53
随着机器人技术的不断进步,机器人控制算法也越来越复杂和精细。机器人控制算法的研究是
2023-05-19 16:27
机器人的控制方法不胜枚举,本文以三菱PLC用CC-LINK方式控制机器人为例,简单地讲述一下通用
2023-06-28 12:46