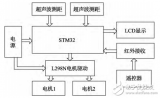
本文主要介绍了一种基于STM32的可遥控智能跟随小车的设计与实现,采用了超声波测距、电机驱动、红外遥控等功能模块设计。STM32连接了LCD显示模块和红外接收电路,分别用于显示运动、状态信息和接收遥控器的
2017-12-23 14:47
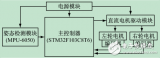
本文主要对基于STM32和MPU-6050的两轮自平衡小车系统设计与实现进行了分析,采用高性能STM32F103C8T6作为主控制器,采用卡尔曼滤波算法和双闭环PID
2017-12-23 16:36

学习一种单片机最快的方式莫过于用它实际制作一个作品了,前些天看到有人在玩平衡小车,感觉非常有趣,于是就决定自己动手制作一个基于stm32的两轮平衡小车。从电路板设计,到程序编写,一步一步的,希望自己在这个过程中有一定
2023-07-25 15:48
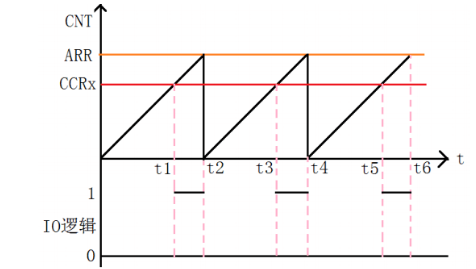
做STM32智能小车的实验中会用到定时器PWM输出,来改变直流电机的转速。分享本文了解如何通过PWM实现对电机速度的控制。
2023-07-06 09:56

本文主要介绍了一种基于STM32单片机的视频遥控小车的设计,采用STM32单片机作为主制器,通过一款Wifi射频模块RT5350实现远程视频画面的传输,整个项目涵盖的知识面广,包括单片机编程技术,OpenWrt路由器
2017-12-25 14:52
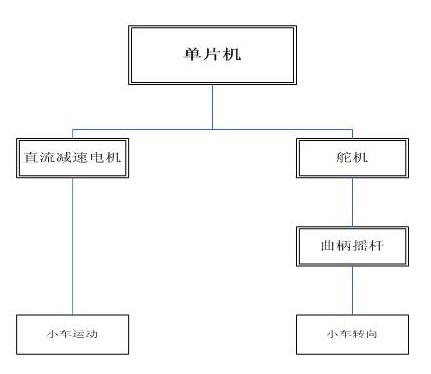
在小车的机械要求保证预定的功能的前提下,我们还考虑到小车的经济、可靠、外形美观,性能好、富有时代特点。 转向机构与驱动系统的设计是至关重要的。为了保证小车转向时精确、灵敏、可靠性高且在转向时
2019-08-14 17:28
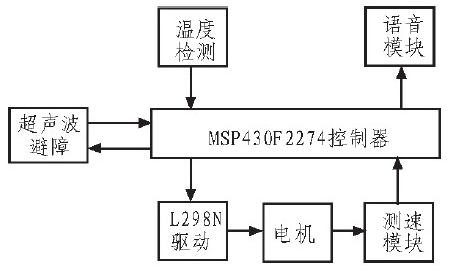
该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。采用
2019-10-04 17:15
可以实现远程无线遥控,只要有网络的地方,都可以做控制端或者被控制端,例如,你在北京,我在广州,你就可以控制这个小车的动作,在SMC盒子上接上摄像头,完全实现无线遥控控
2012-03-02 10:08

P1.0开关接5V时,右转弯灯闪亮,P1.1开关接5V时左转弯灯闪亮。P1.0、P1.1 开关同时接5V或接地时,转弯灯均不闪亮。
2018-03-13 15:56
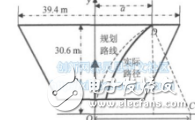
视觉导航作为新兴起的技术,受众多研究者的青睐.设计了以现场可编程门列阵(FPGA)为控制核心的自主导航小车,采用一种新颖的自适应路径识别算法实现路径的识别与提取,并结合圆弧路线规划和控制策略完成
2017-11-18 12:29