摘要:针对基于双目深度图的室外大规模地图构建计算冗长,而在无人系统的有限算力下,计算效率需求显著的情况,文中提出一种基于双目视觉立体匹配的三维地图构建方法。首先针对由立体匹配算法及原图引入的噪声误差
2022-08-10 11:38

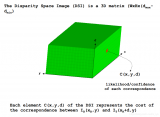
立体匹配是计算机视觉的重要领域,通过给定一对经过校正的图像,计算对应像素之间的位移,即视差。
2023-05-16 09:05
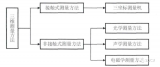
双目立体匹配可划分为四个步骤:匹配代价计算、代价聚合、视差计算和视差优化。
2020-08-31 10:08
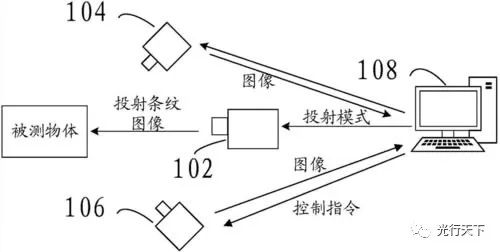
该方法具体通过六个步骤实现:图像的采集、系统相机标定、特征模板匹配、图像处理、三维仿真匹配以及三维重建。首先,通过两个相机于不同位置对待测物体进行图像信息感知获取。然后
2023-09-01 16:12

航空建筑深度估计是三维数字城市重建中的一项重要任务,基于深度学习的多视图立体(MVS)方法在该领域取得了较好的成果。目前的主要方法通过修改MVS 框架实现建筑物的深度估计,缺乏对建筑物内在结构的考虑,易导致精度不足等
2024-11-07 10:16

三维场景理解与重建技术主要包含场景点云特征提取、扫描点云配准与融合、场景理解与语义分割、扫描物体点云补全与细粒度重建等,在处理真实扫描场景时,受到扫描设备、角度、距离以
2023-08-08 16:58

下图展示了这种方法的主要流程,首先需要从图像中抽取目标和对应的反射区域,而后对特征进行匹配,并基于这些信息进行水面法向量估计和和反射场景的辐射估计,最后进行立体匹配和深度计算;针对有波纹的水面,还需要对波浪进行一定的
2019-08-02 14:54
随着计算机科学和数字成像技术的飞速发展,光学成像技术在许多领域中得到了广泛应用,其中之一便是物体三维重建。物体三维重建技术是一种通过计算机处理图像数据,获得物体三维信息的技术。光学成像技术作为物体
2023-09-15 09:29
对于新手来说,使用格雷码做单目结构光三维重建是一个入门级的训练。但是在复现时往往会遇到一个问题,明明解码都很不错了,重建后的点云精度却很低,甚至重建出来的平面点云出现断层现象。
2023-01-13 11:41
根据Schrstein和Szeliski的总结,双目立体匹配可划分为四个步骤: 匹配代价计算、代价聚合、视差计算和视差优化 。 一 、匹配代价计算 匹配代价计算 的目的
2023-06-28 16:59