旋转电弧传感弧焊机器人焊缝实时纠偏系统研究:本文介绍了以高速旋转电弧为传感器的弧焊机器人焊缝实时纠偏系统, 首先设计了适应机器人
2009-06-06 18:03
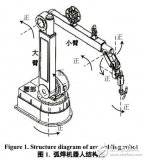
弧焊机器人作为一种典型的6自由度串联机器人,在汽车等行业中发挥着越来越重要的作用。本文以一款自主研发的弧焊机器人为实例,
2018-01-09 18:47

机器人研究经历了3 个阶段,即示教再现编程阶段、离线编程阶段和自主编程阶段。因技术尚不成熟,目前,在国内外生产中应用的机器人系统大多处于示教再现编程阶段。本实验室采用首钢莫托曼公司生产的弧
2017-10-13 16:03
本文对履带式智能弧焊机器人系统的总体组成、基本功能及实施方案等作- 介绍,并对系统中的关键技术进行详细分析。该爬行机器人具有适应性强,智能化程度高的特点,可适应于垂直
2009-07-03 09:51
弧焊机器人是典型的机电一体化高科技产品,具有功能强大、操作简便、自动化程度高等特点。在一定程度上可以代替焊接工人的工作,特别是在人类难以直接作业的特殊场合(如水下、空间和核辐射环境等),发挥
2018-01-31 13:37
本文介绍爬行式弧焊机器人结构光三维视觉传感器的传感原理、系统组成和设计依据。用会聚透镜和柱透镜组合产生线长35~ 40 mm、线宽1 mm 的光纹投向焊缝, 热敏电阻组成桥式自功
2009-07-13 08:21
弧焊机器人作为工业机器人中使用最为广泛的一种机器人,其控制系统的研究一直是行业的热点。针对常规示教再现型系统无法满足复杂焊缝加工精度的问题,本文基于GUC-T嵌入式运动
2018-01-30 10:58

系统采用PC BASED 控制,系统在微软的Windows 界面下操作。PC BASED 控制系统的设计,再加上标准化的个人电脑硬件,以及简单的规划和设置,使其MTBF( 平均故障间隔时间)超越7 万5千小时。而机器人平均使用寿命更长达10 到15 年。
2017-10-18 15:33
2013-05-18 06:36

2023-09-25 08:31