并联机器人控制。
2021-04-20 15:57

机器人技术发展到现在,虽然已经得到了突飞猛进的进步,但是对于并联机器人运动学正解的封闭解问题依然是机器人技术的瓶颈,在实际应用中采用的广义几何法和方程组的数值解法等,不但推导过程非常复杂,而且在求解
2017-12-01 16:08
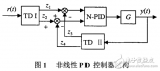
采用分散控制策略和非线性 P ID 控制算法, 实现 6 自由度并联机器人的高精度轨迹跟踪控制。该非线性 P ID 控制器由两个二阶非线性微分跟踪器提供高质量的微分信号, 并采用非线性组合形成控制
2017-11-08 16:33

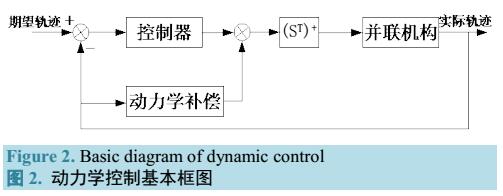
研究了 并联机器人 冗余驱动控制方法首先将系统动力学方程投影到位形空间并采用计算力矩方法设计期望的控制输入然后构造位形空间与驱动力空间之间的映射以求解冗余输入优化问
2011-07-06 17:57
为了提高冗余并联机器人的控制精度,本文针对二自由度冗余驱动并联机器人,基于并联机器人同步耦合误差控制理论,提出了一种非线性同步控制方法。首先,利用李雅普诺夫稳定性理论,对提出的控制方法进行稳定性
2018-04-24 15:47
通过与传统的串联机器人的比较,分析了并联机器人的特点。介绍了并联机器人在运动模拟器、并联机床。工业机器人、微动机构、医用
2017-10-17 15:22
基于OpenMP的Stewart并联机器人控制系统_李昂
2017-03-19 19:12
根据平面微小并联机器人系统的功能设计要求,在机器人系统的机构、控制分析的基础上,于设计阶段引入正逆向求解,适当的限定条件保证了坐标变换和运动轨迹规划的唯一性,
2010-03-03 15:13
并联机器人和传统工业用串联机器人在哲学上呈对立统一的关系,和串联机器人相比较,并联机器人具有以下特点口:无累积误差,精度较高;
2020-03-11 16:12
本文针对一种以步进电机驱动的少自由度并联机器人,采用带分离干扰补偿器的离散变结构控制器。仿真结果表明该算法解决了传统变结构控制在数字实现时的抖振问题,且系统抗
2010-03-03 14:55