自平衡机器人的控制系统设计 引 言 移动式机器人在各行各业具有广泛的应用,而轮式移动机器人由于具有结构简单、可控性强、成本低等优点,成为
2009-12-15 17:25
编者注:本项目编译自Makezine,来自3D Robotics设计主管Jason Short。Makezine将本项目的难度定位为:Very Difficult(非常难),够自信你也来挑战一下吧!
2018-09-12 10:29
我们将通过导入库头来实现,构造Monster类的一个实例,并使用Timer Interrupt(来自TimerOne.h库)定期调用ComputeBalance()函数。
2019-08-23 09:15
本文将介绍如何使用Arduino来制造一个自动平衡机器人,并介绍其控制原理。
2022-04-02 17:28
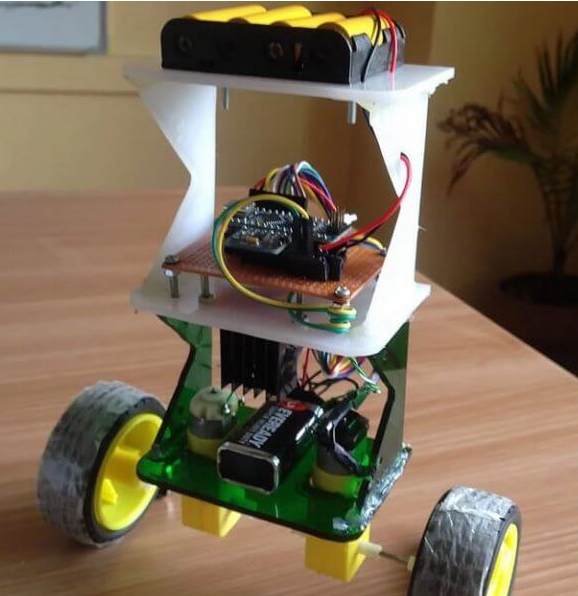
您好朋友,这篇文章是关于DIY自平衡机器人的,我将向您展示如何构建自己的自平衡机器人。
2021-04-27 10:48
Facebook获得了一项关于自平衡行走机器人的新专利,该专利中指出,机器人“头部单元”由一个显示屏和一个摄像头构成,让其能够追踪抓拍用户的每一个动作和去向。
2018-03-22 15:03
这是一个很简单的机器人,使用一个简单的开关作为传感器,利用倒立摆的机制站站在两个轮子上。
2018-09-10 16:42
关于编码,您得益于Kalman滤波器和PID(比例,积分和微分)控制,可以轻松地在Internet上找到该项目的代码,从而提高了机器人的稳定性。
2019-09-30 11:27
了,电动机将没有足够的扭矩来使车轮足够快地旋转,过低又可能使电动机太慢而无法转动抓住机器人的倾斜。一块水平的胶合板底部装有Arduino Uno和电机控制器
2019-10-18 09:41
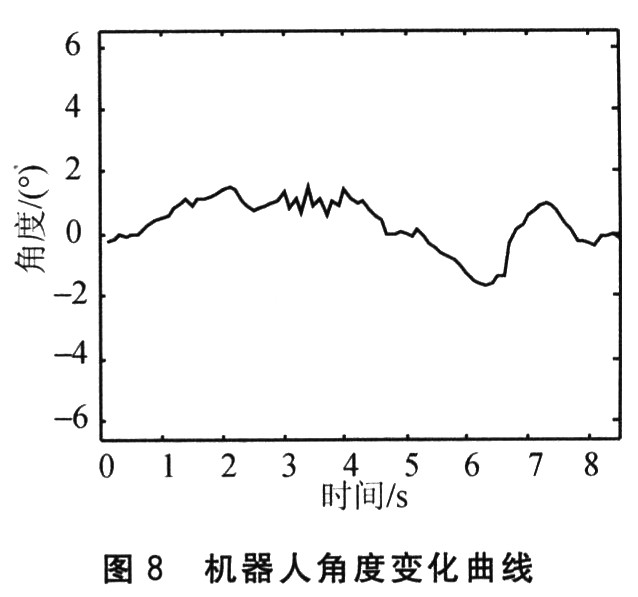
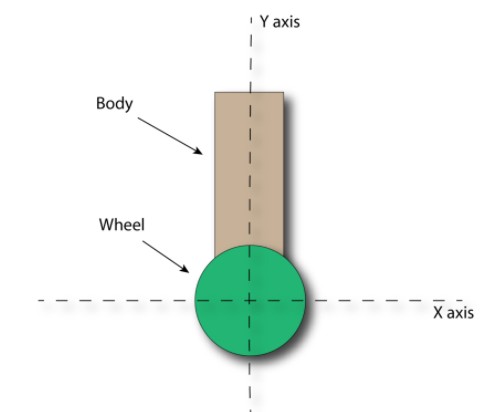
当身体向前倾斜时,Y轴与身体之间会有一定角度。MPU6050陀螺仪传感器检测到该角度,然后将此数据发送到Arduino。Arduino现在执行PID计算,并命令步进电机正向运行,以将倾斜角最小化到零度。
2020-05-14 09:47