
电机采用的是平衡小车之家的MG310(GMR编码器)电机。底板上有两个TB6612芯片,可以驱动四个电机,除了做平衡小车之外,也可以用来作为四驱车的底板,非常nice,
2023-11-30 09:31

学习一种单片机最快的方式莫过于用它实际制作一个作品了,前些天看到有人在玩平衡小车,感觉非常有趣,于是就决定自己动手制作一个基于stm32的两轮平衡小车。从电路板设计,到
2023-07-25 15:48
电机用的GB37电机,是一款使用霍尔传感器编码器的测速模块,配有13 线强磁码盘,A B 双相输出共同利用下,通过计算可得出车轮转一圈时,脉冲数可达30132=780 个,单相也可以达到390 个,精度足够能让平衡小车无所不能。
2018-07-31 11:44
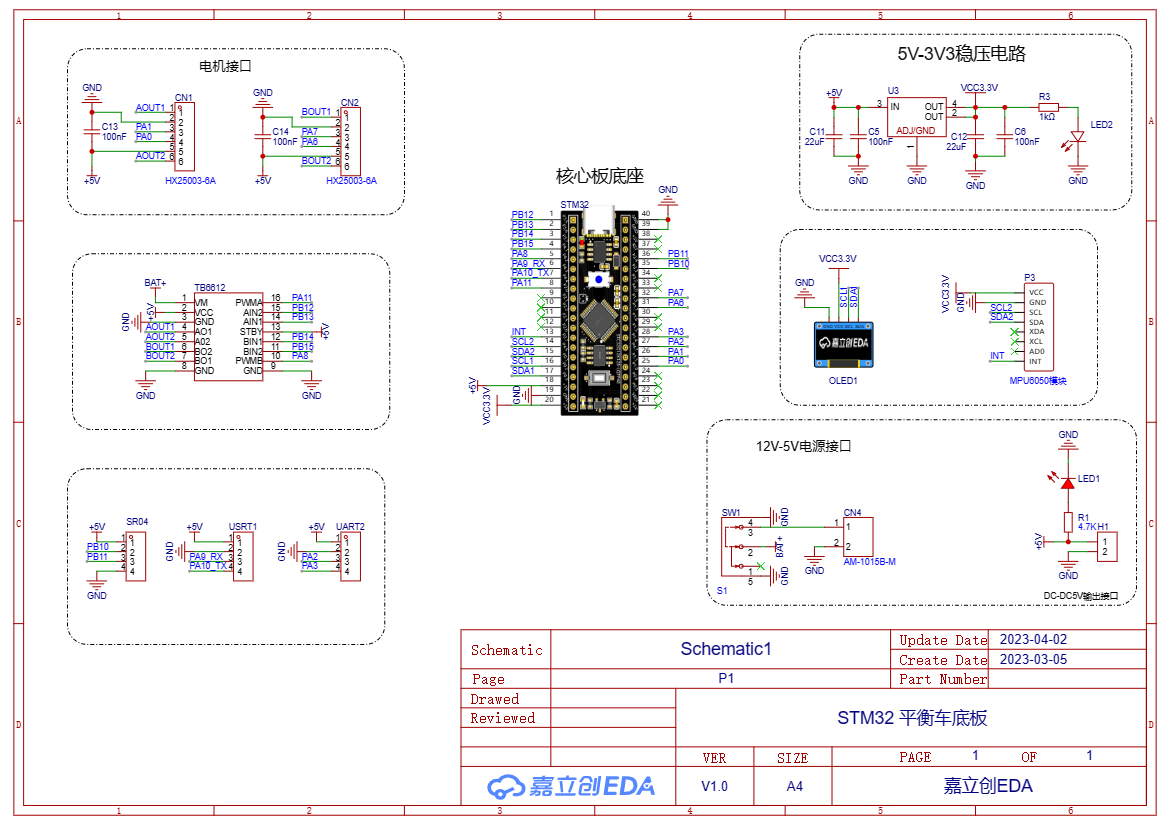
基于STM32的平衡车开发
2023-04-27 14:30
续上文,电机驱动、MPU6050驱动均已完成,接下来我们给他加上PID让它站起来。
2023-04-27 14:40

续上文,电机驱动部分完成,接下来我们给他加上一个OLED的显示功能和MPU6050的姿态检测功能。
2023-04-27 14:37
最小系统:包括stm32f405rgt6,晶振电路,复位电路。R2和R3用于配置启动方式。C9和C12是单片机内部电源变换部分的滤波电容。最小系统基本都是一样的,按照常用的电路设计一般没有错。那几个电容式芯片的去耦电容,注意一下,模拟电压、模拟地和数字电源、数字地之间用磁珠隔离,防止数字电路的高频噪声影响到模拟电路的精度。
2019-12-02 16:27
基于上述目标,本方案采用超声波测距模块作为小车平衡状态的检测,免去了对加速度、陀螺仪传感器的理解和复杂处理算法。小车的平衡控制仍然采用网络上流行的Arduino开源硬件
2015-11-16 09:37

本项目由瑞萨RA2E1 MCU芯片作为主控,搭载电源模块、MPU6050模块、超声波模块、OLED模块、蓝牙模块、电机模块等组成的蓝牙平衡小车。该小车有平衡模式、跟随模
2024-01-08 12:17

基于STM32两轮自平衡小车系统设计与控制 含源码、原理图及PCB文件.主控芯片用的是100脚的STM32F103VET6,陀螺仪用的是MPU6050,电机驱动用的是TB6612,蓝牙是汇承的HC05邮票孔封装的,WIFI用的是济南有人科技的USR-WIFI232
2022-04-30 23:20