
简而言之,功能安全的最终目的是确保产品安全运行,即便出现问题也可以继续保驾护航。基于这一理念,ARM将保证安全视为头等大事,而非单纯依照市场导向随波逐流,不断加强研发,推出更多功能安全相关产品。
2018-04-28 10:00
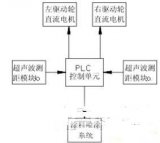
,然后进行机械喷涂。人工标线工作量大,且工作进度较慢,精度较差。针对这种现象本文介绍了公路划线机划线导向机器人,专门用于提供划线机较准确的路线,减轻了人工标线的工作量,提高了划线的准确度。
2018-02-13 03:37
视觉导向的机器人和无人机因此不仅需要强大的处理能力,还需要有能力进行功耗优化,提供面向未来且具有可扩展性的解决方案。
2018-03-21 11:59
制动控制器的可靠性对于轨道交通车辆行车安全具有重要意义。鉴于此,提出了一种制动控制器故障检测与安全导向方法,其能有效提高制动控制器可靠性,解决因制动控制器故障导致的列车无法安全停车问题,提高制动系统的可靠性。
2022-12-14 10:44
随着混合动力车辆/电动车辆(HEV/EV)市场不断扩大,人们对于更高效和智能的电机位置控制的需求也变得更为关键。今天,原始设备制造商(OEMs)比以往任何时候都更专注于如何增强电机的能力(例如:扭矩
2018-12-21 11:50

现在已知的是II和pp,要求的是qq。而如果能求得参数aa和bb,显然就能通过II和qq之间的线性关系来求出II。另一方面,还可以知道pp是qq受到噪声污染而产生的退化图像,假设噪声是nn,则有qi=pi−niqi=pi−ni。
2019-02-15 14:33
使用LabVIEW和用于DENSO的ImagingLab Robotics库,机器视觉和机器人系统可以集成在一个应用程序中。本文介绍了使用相同坐标系统在机器视觉系统和机器人系统之间进行标定的方法。本文是用于DENSO的ImagingLab Robotics库参考指南的一部分,并且假设您已经熟悉该库的基本使用方法。
2017-11-17 17:03

透过生物启发方式撷取影像中的“事件”(event)听起来不仅酷炫,而且未来感十足。但有多少开发人员真正目睹基于事件的机器视觉技术效果?
2018-06-13 16:15

要开发的应用似乎不存在解决方案是很正常的,甚至几乎是情理之中的。为了满足应用要求,我们需要想出一种超出市场上现有产品性能的解决方案。例如,应用可能需要具有高速、高电压、高输出驱动能力的放大器,同时还可能要求出色的直流精度、低噪声、低失真等。
2019-11-25 16:39
