分别对应连接CM模块和LXM28A伺服的CAN_H、CAN_L和SHLD引脚,在CM模块CAN_H和CAN_L之间接入120欧姆电阻,并且在CANopen网络中最后一台设备CAN_H和CAN_L之间接入120欧姆电阻。
2022-07-26 10:01
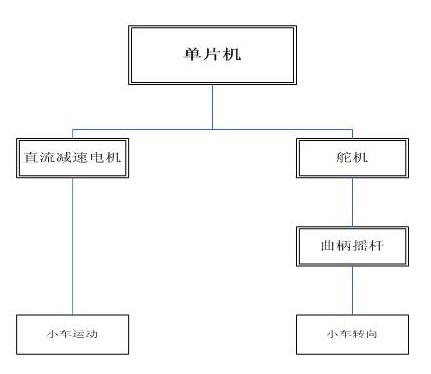
在小车的机械要求保证预定的功能的前提下,我们还考虑到小车的经济、可靠、外形美观,性能好、富有时代特点。 转向机构与驱动系统的设计是至关重要的。为了保证小车转向时精确、灵敏、可靠性高且在转向时
2019-08-14 17:28
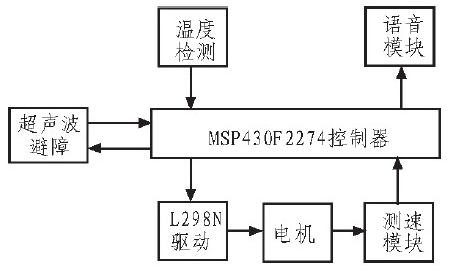
该系统主要由MSP430控制器,超声波避障模块,电机驱动,测速,语音模块,温度模块,小车的机械运动部分采用四轮差速转向式结构,前2个轮是驱动轮,分别由电机控制其运动,后两轮为随动轮。采用
2019-10-04 17:15
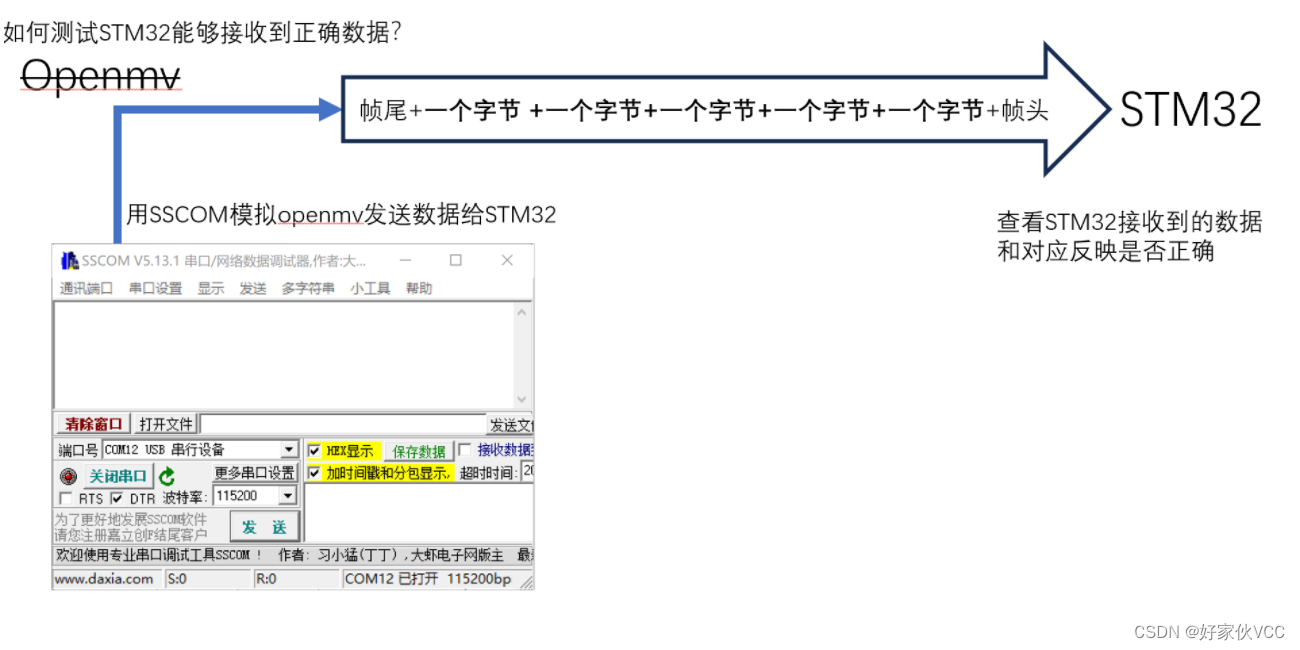
19.4-STM32接收数据-状态显示在屏幕 openMV寻迹与小车控制 Openmv+STM32F103C8T6视觉巡线小车
2024-08-20 11:12

mBot Mega 是一款先进的二合一机器人套件。全金属外壳,科技感十足,自主拼装,享受动手乐趣与成就感。4个直流电机搭配全向移动麦克纳姆轮,可进行机器人移动算法学习,实现万向移动等更灵活更高级的机器人运动控制,尽享超感遥控体验。
2023-05-19 16:05

小车运动及速度控制一、实验目的小车在运动中,控制小车的控制速度是必要,通
2009-03-23 11:01
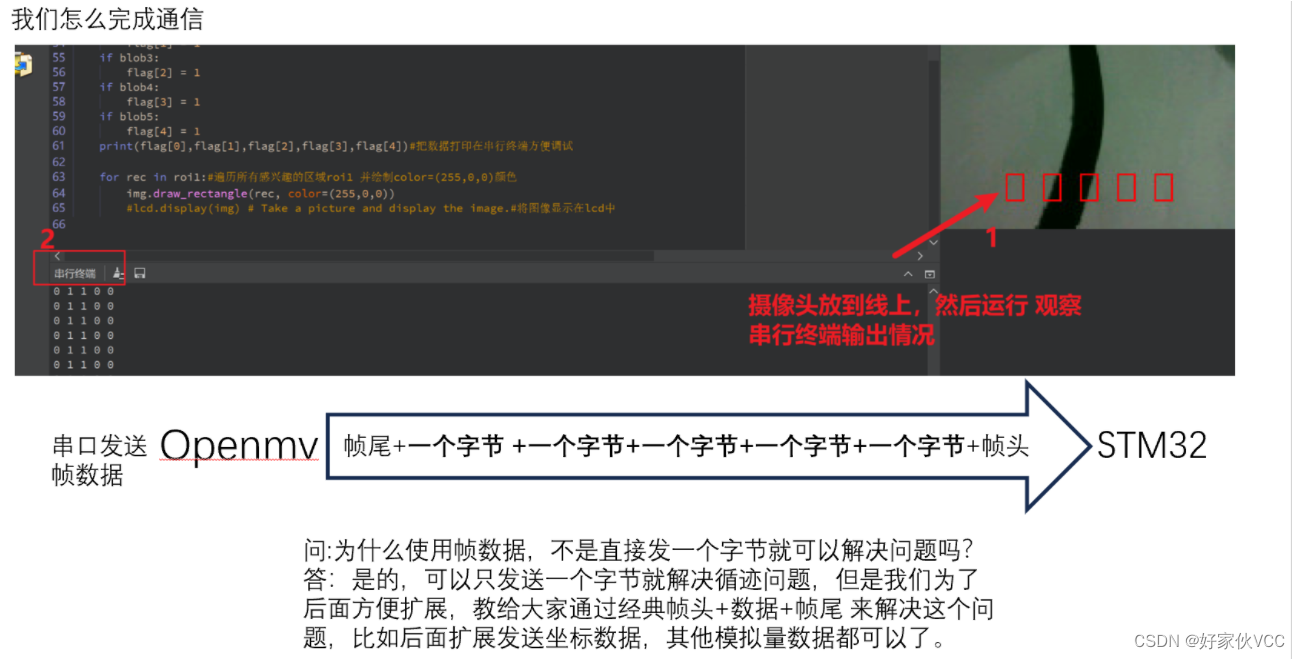
19.3-【星曈科技】openmv Hopenmv发送五个uchar Openmv+STM32F103C8T6视觉巡线小车 STM32循迹小车系列教程 使用OpenMV循迹 openMV寻迹与小车
2024-08-20 11:32

CW32循迹小车.zip_免费高速下载|百度网盘-分享无限制 一、概述 CW32循迹、遥控小车具有循迹和遥控两种功能,小车的硬件模块由CW32F030C8T6小蓝板、智能小车
2024-05-31 17:33
在不懂得小车控制算法精髓的时候,我们是无法对小车进行精确的控制的。目前绝大多数小车都是用PID
2019-10-06 07:15

小车综合控制实验小车综合控制实验一、实验目的在前面的使用中,主要针对小车的局部功能进行编程。本实验要求综合运用
2009-03-23 11:06