小型平行履带底盘可以通过两侧履带的 差速运动 来实现前进、后退、原地转向、大半径转向等基本行驶功能。
2023-01-12 14:50

1.运动功能说明 双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过底盘运动与小臂运行的结合,实现上台阶、通过
2023-01-07 10:56
双节履带车可以通过两个驱动轮的差速运动来实现前进、后退、原地转向、大半径转向等基本行驶功能,并可通过舵机关节模块进行小臂的抬起和落下。通过底盘运动与小臂运行的结合,实现上台阶、通过坑洼地面等功能。
2023-01-29 09:15
为实现对微小型履带式移动机器人的最优控制,以微小型覆带式移动机器人原型为基础,利用ADAMS建立该机器人的模型,并设置材料属性、关节等,并根据实际情况施加各种受力,通
2010-08-06 23:05
根据该无人自动驾驶耕播机在田间的实际演示,该机器可实现自动耕播、施肥、除草等一系列农业生产工序。一次旋耕深度可达22CM。
2019-11-28 14:38

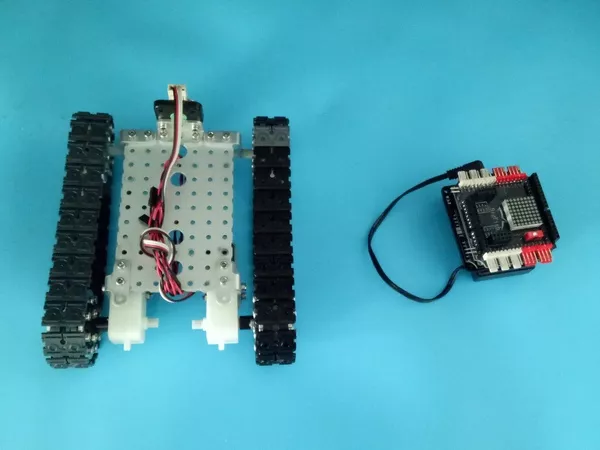
1. 功能说明 在小型平行履带底盘样机上安装2个 灰度传感器 ,实现机器人沿指定路线进行运动的效果。 2. 使用样机 本实验使用的样机为R026a样机。 3. 功能实现 3.1 电子硬件
2023-03-09 08:52
写在前面:看着网上那些履带底盘,怎么看怎么不舒服,还是决定自己做。这样就带来一个很大的问题,就是很多结构件都要用3D打印。我自己有3D打印机,下面不但会给出设计,还会给出实物照片。但是,对于没有3D
2019-02-19 03:54
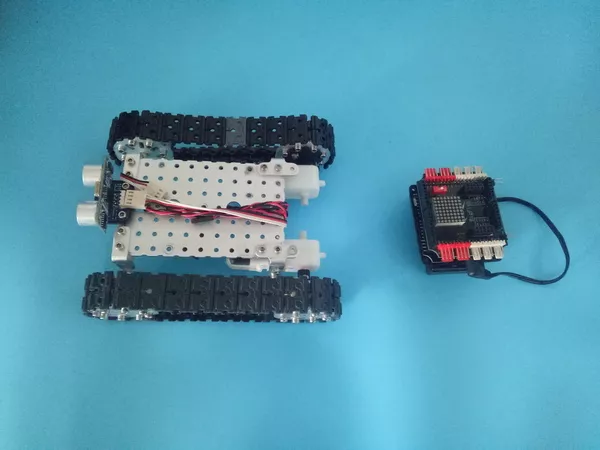
1. 功能说明 本实验使用的样机为R026a样机小型平行履带底盘。在样机前方安装1个 超声波传感器 ,如果遇到障碍,机器人后退、转向,否则机器人前进,实现机器人避障的效果。 2. 电子硬件
2023-03-09 08:49
1. 功能说明 本实验使用的样机为R026a样机小型平行履带底盘。在样机前方安装1个 近红外传感器 ,如果遇到障碍,机器人后退,否则机器人前进,实现机器人避障的效果。 2. 电子硬件 在这
2023-03-09 08:46

真正的“路虎”--可升降地盘+强劲动力履带2WD小车地盘。
2019-12-01 10:41