mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15
姿态传感器是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计,三轴电子罗盘等运动传感器,通过内嵌的低功耗ARM处理器得到经 过温度补偿的三维姿态与方位等数据。利用基于四元数的三维算法和特殊
2019-12-25 10:36

介绍 一般意义上,相机姿态估计通常依赖于如手工的特征检测匹配、RANSAC和束调整(BA)。在本文中,作者提出了PoseDiffusion,这是一种新颖的相机姿态估计方法,它将深度学习与基于对应关系
2023-07-23 15:22
基于CAD模型的物体姿态估计:目前最先进的物体6DoF姿态估计方法可以大致分为回归和关键点技术。第一类方法直接将姿势参数与每个感兴趣区域(RoI)的特征进行回归。相反,后一类方法首先通过回归或投票
2022-08-10 11:42
先通过图像编码器计算表示图像向量。然后通过评估分布在地图上的初始姿态候选来搜索相机姿态。姿态编码器对相机姿态进行处理以产生可以与图像向量相匹配的潜在表示,每个候选
2023-04-03 09:51

利用opencv+openpose实现人体姿态检测,附详细代码。 通过一个偶然机会,我了解到了人体姿态解算,在学习K210之余,我便想着通过opencv实现这个功能,查找了很多资料,发现可以
2023-06-26 10:15

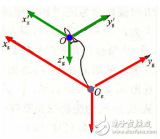
首先要指出的是,Mahony算法假设加速度计测量的加速度完全由重力提供,即物体本体运动产生的加速度可忽略不计。在这一假设下,我们假设当前时刻机体的姿态为,则将重力向量的表示转到机体坐标系下,应该为:,这里表示四元数对应的旋转矩阵:
2023-05-22 09:22

ANSA的人体模型姿态调整工具(HBM Articulation Tool)通过网格变形技术实现基于人体不同部位进行调节,定位人体模型最终的姿态。
2025-09-28 15:40

本文主要介绍了基于STM32的四旋翼飞行姿态串级控制的设计与实现,行器控制器通过处理微型MEMS惯性器件和三维地磁传感器采集的数据,计算飞行器的姿态角,并根据飞行指令,结合相应的控制律给出适当的控制信号,控制飞行器姿态
2017-12-23 15:24
介绍了mpu6050姿态融合原理及程序代码分析,MPU6050是一款姿态传感器。主要介绍三种姿态融合算法:四元数法、一阶互补算法和卡尔曼滤波算法。
2017-12-11 13:31