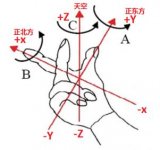
mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿
2018-03-09 09:15

本文主要介绍了mpu6050姿态解算原理分析及程序设计,MPU6050硬件DMP解算
2017-12-11 13:51

通过一个偶然机会,我了解到了人体姿态解算,在学习K210之余,我便想着通过opencv实现这个功能,查找了很多资料,发现可以利用opencv+openpose实现,接着我又开始找一些资料,在pycharm上部署。
2023-05-22 10:44

利用opencv+openpose实现人体姿态检测,附详细代码。 通过一个偶然机会,我了解到了人体姿态解算,在学习K210之余,我便想着通过opencv实现这个功能,查
2023-06-26 10:15

本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及MPU6050DMP初始化函数、DMP姿态解算后的俯仰角、横滚角和航向角。
2017-12-11 14:26
针对在导航系统姿态解算中,陀螺仪和电子罗盘在解算姿态时分别存在积分误差和
2018-05-02 08:27

之前调试基于QMI8658 6轴姿态解算的时候,我对Mahony滤波的认识还比较浅薄。初次的学习和代码的移植让我对四元数、欧拉角、旋转余弦矩阵有了一定的接触。然而,直到我将地磁传感器加入到我的硬件
2023-11-13 10:55
在地理信息系统(GIS)和大地测量学中,基线解算是一个关键的步骤,用于确定空间对象的精确位置。基线解算通常涉及到多个起算点,这些起算点的选取和排序对于解
2024-07-11 15:11
无人机求解姿态角有多种算法,但由于各种算法的自身限制及计算机计算速度的限制,所以我们需要选择一个较佳的求解算法
2018-07-04 14:35

三轴陀螺仪是惯性导航系统的核心敏感器件,其测量精度直接影响惯导系统的姿态解算的准确性。对于三轴陀螺仪来说,其测量结果的精度与构成三轴陀螺仪的各单轴陀螺仪的零偏误差、刻度系数误差、随机漂移误差以及各单
2017-10-26 20:02