mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿
2018-03-09 09:15

本文主要介绍了mpu6050姿态解算原理分析及程序设计,MPU6050硬件DMP解
2017-12-11 13:51
在进行姿态解算分享之前,先分享一个踩坑经历。一般来说MPU6050的ID读出为0x68,淘宝上买到的模块,基本上都是这个。
2023-07-04 09:15

IMU惯性测量单元,融合加速度计、陀螺仪和磁力计的核心传感器,实现高精度姿态解算
2025-03-07 14:09
作用于四轴无人机,平衡车,机器人等等的电子实作当中,用于姿态判断,掌握了可以发挥自己的想象完成更多更有趣的作品。
2017-11-07 10:07
星敏感器是以恒星为参照系,以星空为工作对象的高精度空间姿态测量装置,通过探测天球上不同位置的恒星并进行解算,为卫星、洲际战略导弹、宇航飞船等航空航天飞行器提供准确的空间方位和基准,并且与惯性陀螺一样都具有自主导航能力
2017-11-17 18:43
最近在研究小四轴的飞行,姿态检测主要用到的传感器是MPU6050。从MPU6050读出来的加速度和角速度数据最后要转成姿态,可以转换成欧拉角(偏航角、俯仰角和滚转角)或四元数表示,为了减少计算量(欧拉角涉及正弦运算,运算量相对较大),方便在STM32主控上实现,可
2017-11-07 10:39

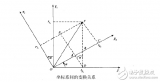
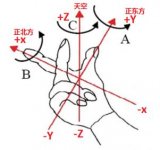
和欧拉角。 姿态解算选用的旋转顺序为ZYX,即IMU坐标系初始时刻与大地坐标系重合,然后依次绕自己的Z、Y、X轴进行旋转: 绕IMU的Z轴旋转:航向角yaw 绕IMU的Y轴旋转:俯仰角pitch 绕IMU的X
2023-11-14 10:11
在地理信息系统(GIS)和大地测量学中,基线解算是一个关键的步骤,用于确定空间对象的精确位置。基线解算通常涉及到多个起算点,这些起算点的选取和排序对于解
2024-07-11 15:11
无人机求解姿态角有多种算法,但由于各种算法的自身限制及计算机计算速度的限制,所以我们需要选择一个较佳的求解算法
2018-07-04 14:35