将陀螺仪绕X轴旋转时,只有wx有读数;将陀螺仪绕Y轴旋转时,只有wy有读数;将陀螺仪绕Z轴旋转时,只有wz有读数;
2020-06-05 10:08
姿态估计的作用? 姿态估计是飞控算法的一个基础部分,而且十分重要。为了完成飞行器平稳的姿态控制,首先需要精准的姿态数
2023-11-13 11:00

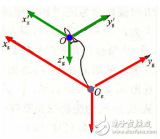
首先要指出的是,Mahony算法假设加速度计测量的加速度完全由重力提供,即物体本体运动产生的加速度可忽略不计。在这一假设下,我们假设当前时刻机体的姿态为,则将重力向量的表示转到机体坐标系下,应该为:,这里表示四元数对应的旋转矩阵:
2023-05-22 09:22

首先要指出的是,Mahony算法假设加速度计测量的加速度完全由重力提供,即物体本体运动产生的加速度可忽略不计。在这一假设下,我们假设当前时刻机体的姿态为,则将重力向量的表示转到机体坐标系下,应该为:,这里表示四元数对应的旋转矩阵
2023-05-22 09:18
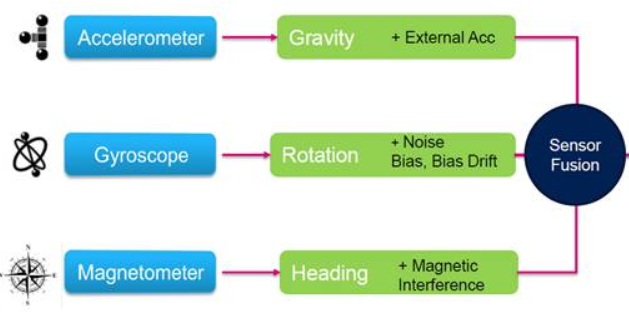
简单来说,姿态融合算法就是融合多种运动传感器数据(一般需要3轴加速度, 3轴陀螺仪或者3轴地磁感应传感器),通过数字滤波算法容错补偿,实现当前姿态检测。
2017-09-05 09:47
据麦姆斯咨询介绍,惯性测量单元(Inertial Measurement Unit,IMU)是测量物体三轴姿态角(或角速率)以及加速度的装置。通常,IMU内部集成3轴陀螺仪和3轴加速度计,以及运动/姿态算法。如果IM
2022-09-28 10:32
星敏感器是以恒星为参照系,以星空为工作对象的高精度空间姿态测量装置,通过探测天球上不同位置的恒星并进行解算,为卫星、洲际战略导弹、宇航飞船等航空航天飞行器提供准确的空间方位和基准,并且与惯性陀螺一样都具有自主导航能力,具有重要的应用价值。
2017-11-17 18:43
介绍了mpu6050姿态融合原理及程序代码分析,MPU6050是一款姿态传感器。主要介绍三种姿态融合算法:四元数法、一阶互补算法
2017-12-11 13:31
人脸姿态估计是通过对一张人脸图像进行分析,获得脸部朝向的角度信息。姿态估计是多姿态问题中较为关键的步骤。一般可以用旋转矩阵、旋转向量、四元数或欧拉角表示。人脸的姿态变化
2025-04-14 17:21
姿态传感器是基于MEMS技术的高性能三维运动姿态测量系统。它包含三轴陀螺仪、三轴加速度计,三轴电子罗盘等运动传感器,通过内嵌的低功耗ARM处理器得到经 过温度补偿的三维姿态与方位等数据。利用基于四元数的三维
2019-12-25 10:36