
LSD (LiDAR SLAM & Detection) 是一个开源的面向自动驾驶/机器人的环境感知算法框架,能够完成数据采集回放、多传感器标定、SLAM建图定位和障碍物检测等多种感知任务。
2023-05-19 09:37

双目匹配需要把左图像素和右图中其对应像素进行匹配,再由匹配的像素差算出左图像素对应的深度,而之前的单目深度估计方法均不能显式引入类似的几何约束。由于深度学习模型的引入,双目匹配算法的性能近年来得到了极大的提升。
2018-06-04 15:46
在自动驾驶赛道中,感知的目的是为了模仿人眼采集相关信息,为后续做决策提供必要的信息。根据所做决策的任务不同,感知可以包括很多子任务:如车道线检测、3D目标检测、障碍物检测、红绿灯检测等等;再根据
2022-10-09 17:54
大家对于这个名词应该不会很陌生。我们在许多品牌的高端车型、行车记录仪或者智能云镜的配置中听到关于“ADAS”的介绍。都知道ADAS有着预测和规避风险的强大技能。而ADAS具体运用到行驶
2018-08-26 10:40
极化码的译码算法研究近年来发展迅速,其中成为研究热点的连续删除(Successive Cancellation,SC)译码算法的基本思想是通过对信息位的比特似然概率值的
2019-01-06 11:19

可以看一下单目深度估计效果,这个深度图的分辨率是真的高,物体边界分割的非常干净!这里也推荐工坊推出的新课程《单目深度估计方法:算法梳理与代码实现》。
2023-12-17 10:01
本论文的研究视角是当前比较热门的两个问题:网格技术和数据挖掘技术。将网格计算和数据挖掘技术结合起来,开发基于网格的数据系统,借鉴传统聚类分析算法CLUQ和K_平均值算法,设计基于网格的全局和局部
2014-02-13 15:21

介绍了自动泊车系统的硬件架构,在此基础上,对自动泊车控制算法进行了设计与研究,包括APA算法功能需求分析,APA控制系统接口确定,系统多个模块的功能算法设计等。整个控制
2023-05-04 11:02
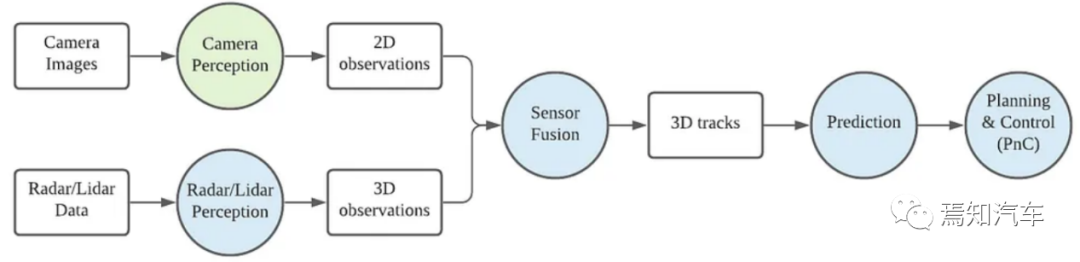
现代自动驾驶系统的特点是按顺序排列的模块化任务,传统的方法是基于标准的感知-规划-控制这种序列式架构的主流处理方式。即首先将感知信息处理成人类可以理解的语义信息和道路交通信息,然后基于常态化知识
2023-12-28 09:56
欧洲不仅是世界汽车工业重镇,也是最大的 ADAS 市场。广义来说,所有协助驾驶员进行驾驶,保证驾驶安全、驾驶舒适以及交通顺畅的智能系统都被欧盟视为 ADAS。
2018-10-14 09:10