双目立体匹配可划分为四个步骤:匹配代价计算、代价聚合、视差计算和视差优化。
2020-08-31 10:08

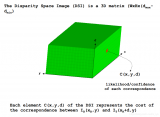
立体匹配是计算机视觉的重要领域,通过给定一对经过校正的图像,计算对应像素之间的位移,即视差。
2023-05-16 09:05
根据Schrstein和Szeliski的总结,双目立体匹配可划分为四个步骤: 匹配代价计算、代价聚合、视差计算和视差优
2023-06-28 16:59
事实上,有一些算法的流程比较混合——比如今天我将介绍的一个经典立体匹配算法,它总体来说是局部法的流程,但其中也有少量模块在进行视差优化的过程。
2022-09-07 15:40
摘要:针对基于双目深度图的室外大规模地图构建计算冗长,而在无人系统的有限算力下,计算效率需求显著的情况,文中提出一种基于双目视觉立体匹配的三维地图构建方法。首先针对由立体匹配算法及原图引入的噪声误差
2022-08-10 11:38
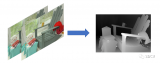
而下面左图是OpenCV的SGBM算法得到的视差图,右边则是通过我今天要介绍的算法处理后的视差图。看了它们后,我想你应该对什么叫做”化腐朽为神奇“有了深刻印象了吧。
2023-01-03 10:59
obj_points、img_points_left和img_points_right分别是存储每个标定图片对应的物理坐标系下的角点坐标、左相机的像素坐标和右相机的像素坐标。这些变量同样在后续的相机标定和立体匹配中用到。
2023-06-08 16:28
在深度相机的主流技术方案Structure Light,ToF,Stereo Dual)中,主动双目成像方案可以基于低成本的硬件,获得高分辨率、高精度的深度图像,但是立体匹配算法(stereo
2023-07-04 11:33

。现有的高精度立体匹配网络,通常需要在较高的分辨率建立代价空间。比如,GANet在1/3分辨率建立代价空间,PSMNet在1/4分辨率,但这会影响网络的效率(GANet处理一对1242×375的图像,需要1.8s,P
2021-06-27 09:21
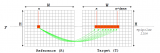
局部区域的像素颜色、空间距离、甚至是梯度等属性特征的相似度来分配匹配窗口内原始代价的权值,权值计算方式是实现该类方法的关键。
2023-11-27 10:29