双目立体匹配可划分为四个步骤:匹配代价计算、代价聚合、视差计算和视差优化。
2020-08-31 10:08

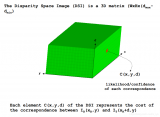
立体匹配是计算机视觉的重要领域,通过给定一对经过校正的图像,计算对应像素之间的位移,即视差。
2023-05-16 09:05
根据Schrstein和Szeliski的总结,双目立体匹配可划分为四个步骤: 匹配代价计算、代价聚合、视差计算和视差优
2023-06-28 16:59
摘要:针对基于双目深度图的室外大规模地图构建计算冗长,而在无人系统的有限算力下,计算效率需求显著的情况,文中提出一种基于双目视觉立体匹配的三维地图构建方法。首先针对由立体匹配算法及原图引入的噪声误差
2022-08-10 11:38
在深度相机的主流技术方案Structure Light,ToF,Stereo Dual)中,主动双目成像方案可以基于低成本的硬件,获得高分辨率、高精度的深度图像,但是立体匹配算法(stereo
2023-07-04 11:33
LTE(长期演进)是3.9G的全球标准,采用OFDM和MIMO技术作为其无线网络演进的唯一标准,极大地提高了系统的带宽[1]。而速率匹配是LTE系统中重要的组成部分,因此速率匹配设计的优劣,决定整个
2017-11-22 14:20
在本文中,我们讨论了如何通过引入一种称为多尺度方法和多尺度二值化解码器( MSDD )的新技术来处理多尺度输入来解决这个问题。
2022-10-11 11:46
OpenCV中模板匹配不支持旋转角度、不支持多尺度跟多对象模板匹配,同时匹配速度比较慢,针对不支持旋转
2023-01-14 10:21

从硬件实现的角度分析了H.264算法,重点研究了占用最多运算时间的预测部分的优化,给出了对帧内预测、哈达马变换以及运动估计算法的改进,通过简化运算复杂、效率不高的模块以
2021-03-17 17:04
最近来看看一些双目稠密匹配的算法。说来惭愧,SGM在航测领域是很重要的算法(当然也是最好的双目稠密匹配算法之一),自己却
2022-12-15 15:12