labview 進行視覺開發,使用模式匹配功能,運算出像素點的差異,不知道怎麼驗算成實際的距離,請大神們幫忙解答一下。萬
2019-10-06 21:05
藍牙4.0無線傳輸鏈接將獲得的數據發送到目標主機,使傳統鼠標脫離對桌面的依賴,只需輕揮手腕,即可實現懸空3D操作,隨意移動控制屏幕光標。 方案設計圖 超低功耗藍
2018-10-04 09:59

针对传统iBeacon指纹定位技术中接收信号强度值(RSSI)波动较大、指纹库聚类复杂、存在较大跳变性定位误差等问题,提出一种基于排序特征匹配和距离加权的蓝牙
2019-01-16 13:48
针对传统的SURF算法未使用图像的颜色信息,提出了一种基于颜色信息和SURF特征相结合的混合图像匹配算法,算法通过提取目
2015-12-24 16:05
本帖最后由 逸興遄飛 于 2016-4-17 14:17 编辑 既然cannon自帶藍牙功能,當然要試一下了,首先根據手冊介紹,瞭解了藍牙的基本知識。 cann
2016-04-17 14:13
在单目视觉同步定位与建图(SLAM)过程中,由于特征匹配阶段存在误匹配且耗时长,使得机器人初始化速度慢、定位精度不髙。针
2021-05-27 14:25
以电视跟踪为应用背景,对图像相关匹配算法进行了研究。并以特征像素统计为基本手段,提出了基于MCD 距离相关匹配法的改进算法
2009-08-07 09:51
一段作为模板2,计算波形与模板的差的平方和,当值最小时,即找到与模板特征匹配的起点索引3,计算波形与模板的差的平方和的值,产生如下波形,取出波谷所在索引即为所有匹配到的位置以下是代码实现演示附上源码`
2019-03-04 13:36
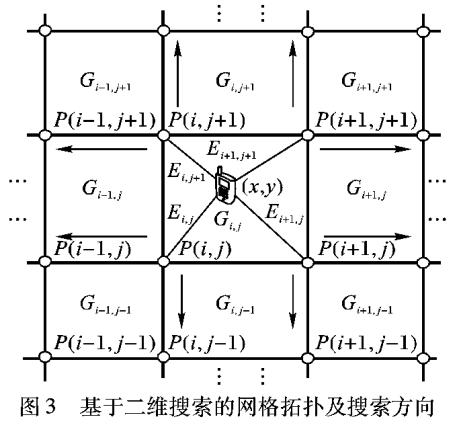
针对接收信号强度值( RSSI)的时变特性降低定位精度的问题,提出了一种基于二维网格特征参数融合的室内匹配定位算法。该
2018-01-29 11:52

针对使用单一特征在复杂场景下车牌定位效果不佳的问题,提出了一种融合了边缘、颜色、纹理等多种特征的车牌定位算法。该
2017-12-18 13:37