
可以看一下单目深度估计效果,这个深度图的分辨率是真的高,物体边界分割的非常干净!这里也推荐工坊推出的新课程《单目深度估计
2023-12-17 10:01

双目匹配需要把左图像素和右图中其对应像素进行匹配,再由匹配的像素差算出左图像素对应的深度,而之前的单目深度估计方法均不能显式引入类似的几何约束。由于深度学习模型的引入,
2018-06-04 15:46

我的论文方向目前是使用单目摄像头实现机器人对人的跟随,首先单目摄像头与kinect等深度摄像头最大的区别是无法有效获取深度信息,那就首先从这方面入手,尝试通过图像获取摄
2023-07-03 10:01
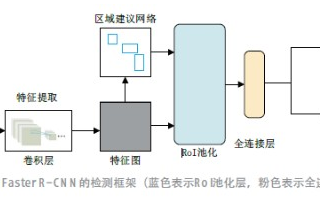
行人检测是目标检测领域中重要的研究课题,其在智能驾驶系统、视频监控、人流量密度监测等领域有广泛应用。但由于行人背景的复杂以及个体本身的差异,行人检测成为目标检测领域的研究难点之一。
2021-05-02 09:55
目前OpenCV中的行人检测算法支持HOG+SVM以及HOG+Cascade两种,二者都采用了滑动窗口技术,用固定大小的窗口扫描整个图像,然后对每一个窗口进行前景和背景的二分类。为了检测不同大小的行人,还需要对图像进行缩放。
2018-08-03 11:27
需要ROS,OSDK,MSDK,三大类的包,后面是行人监测+KCF追踪。
2023-01-29 15:10
基于几何的单目3D目标检测通过2D-3D投影约束估计目标的位置。具体来说,网络预测目标的尺寸(),旋转角。假设一个目标有n个语义关键点,论文回归第i个关键点在图像坐标中的2D坐标和object
2022-10-09 15:51

其次,OpenGL会计算这些表面和观察平面的距离。如果启用了深度缓冲区,在绘制每个像素之前,OpenGL会把它的深度值和已经存储在这个像素的深度值进行比较。新像素深度值
2018-07-05 16:49
行人是城市交通系统的主要参与者,保障行人安全和减少其对机动车的干扰是城市交通系统建设的重要目标,因此对行人交通的研究也越来越受到重视。行人交通研究的主要问题包括
2021-03-29 11:47
