
抓取综合方法是机器人抓取问题的核心,本文从抓取检测、视觉伺服和动态抓取等角度进行讨论,提出了多种
2023-08-19 17:19
最近视觉抓件系统一直会出现抓取零件不到位的问题.下面我将分析一下问题出现的原应.
2023-03-24 16:42
机器人视觉抓取的目的是使用一个机械手模型(包括二指或多指夹爪,吸盘等),以RGB或RGBD相机采集的场景图像为输入计算出一个最优的抓取位姿,使机械手在该位姿下可以稳定地抓取
2023-03-30 10:19

机械臂抓取摆放及堆叠物体是智能工厂流水线上常见的工序,可以有效的提升生产效率,本文针对机械臂的抓取摆放、抓取堆叠等常见任务,结合深度强化学习及视觉反馈,采用AprilT
2023-06-12 11:25
抓取综合方法是机器人抓取问题的核心,因为它涉及到在物体中寻找最佳抓取点的任务。这些是夹持器必须与物体接触的点,以确保外力的作用不会导致物体不稳定,并满足一组抓取任务的相
2022-05-07 15:38
自主抓取是指,在没有人为干预的情况下,视觉机械臂系统通过摄像头获取到目标物体的位置,并且通过驱动机械臂来完成对于目标物体的抓取任务。
2023-08-15 11:29

视觉引导汽配件深框无序抓取上料,替代人工,抓取成功率高
2022-11-02 12:04
最近视觉抓件系统一直会出现抓取零件不到位的问题.下面我将分析一下问题出现的原应.
2022-07-08 09:51
本文主要研究3D视觉技术在机器人抓取作业中的应用,总结了3D视觉技术在识别、定位物体时面临的挑战,给出了抓取作业机器人3D视觉
2019-07-25 08:43
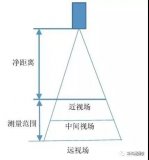
3D视觉技术作为新兴的技术领域还存在很多亟待解决的问题,但2D视觉已不能满足空间抓取的应用要求。与2D视觉相比,3D视觉
2023-05-15 15:23