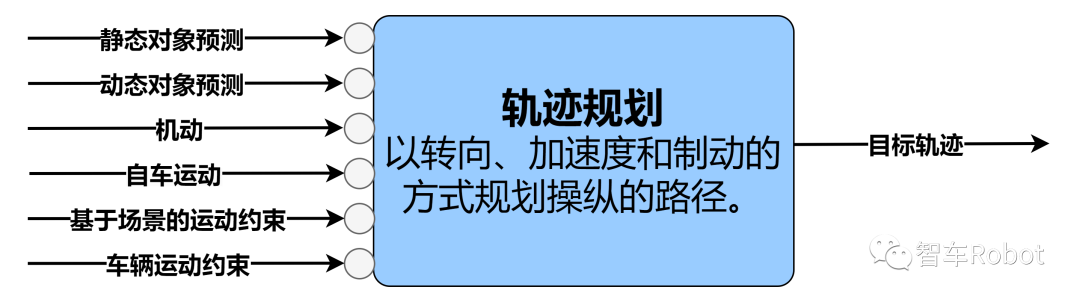
轨迹规划(路径规划) 轨迹规划功能模块图 轨迹
2023-10-04 18:10
让我们从移动机器人运作的流程中来看待规划的作用。
2023-03-08 16:55

EtherCAT运动控制器PT/PVT实现用户自定义轨迹规划。
2024-08-15 11:49
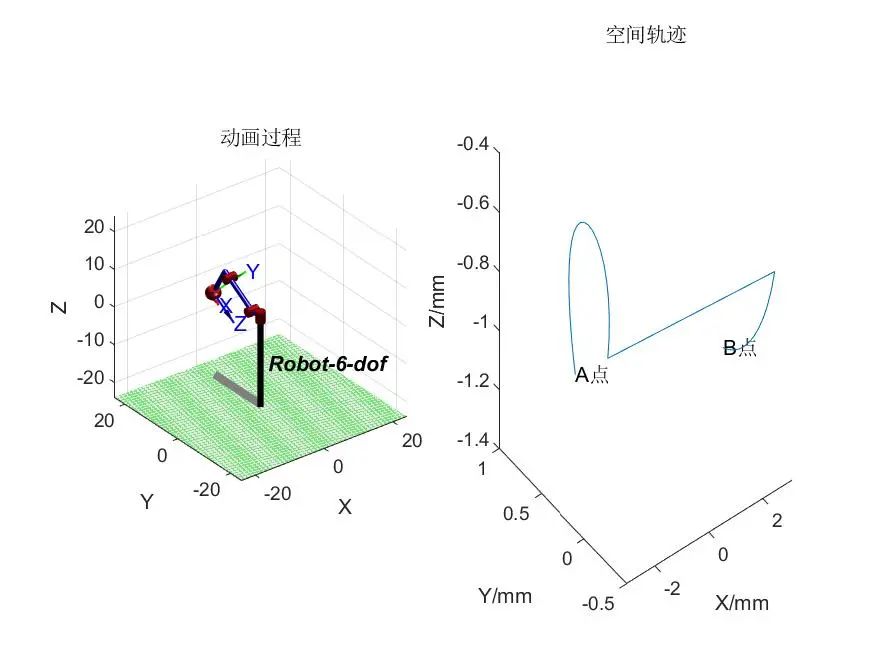
采用五次多项式插值法进行机械臂轨迹规划,基于Matlab Robotics Toolbox平台进行关节空间轨迹规划,得到各关节角度、速度和加速度与时间关系曲线。 此外,
2023-11-17 16:11
本文介绍一种基于Frenet坐标系的优化轨迹动作规划方法,该方法在高速情况下的高级车道保持和无人驾驶都具有很强的实用性,是目前普遍采用的一种动作规划算法。
2018-07-09 09:33
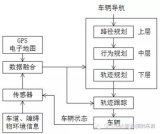
路径规划是智能车辆导航和控制的基础,是从轨迹决策的角度考虑的,可分为局部路径规划和全局路径规划。全局路径规划的任务是根据
2018-10-19 11:17
1、摆动相轨迹设计 基于第二节中提到的原则,文献[1]中提出了一种基于复合摆线形式的轨迹规划方法,并在文献[2]中得到了验证和使用。 针对机器人足底与地面接触时会产生滑动和行走过程中拖地问题,文献
2023-11-22 11:43
轨迹规划本质上来说是一个优化问题。谈到优化问题,我们需要知道优化的约束和优化的目标。首先看约束,第一个约束就是车辆要遵守交规,这是强制性的约束;第二个约束是要避免碰撞;
2019-04-10 18:03
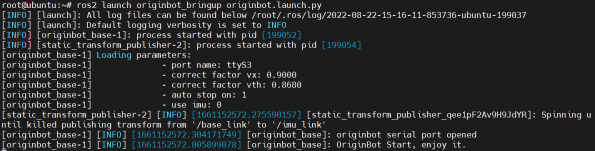
launchoriginbot_autonomous originbot_mpc.launch.py 同时,打开rviz后可以在界面中看到,有如下轨迹显示 原理浅析 PurePuesuit 和 MPC 算法是自动驾驶中常用的控制算法,目的是为了让规划处的
2023-11-15 14:29
时段等。这些信息可以对城市规划、交通管理、公共安全等方面具有重要的指导意义。而为了实现人员轨迹分析,我们需要使用一些专门的算法和技术。 下面是几种常用的人员轨迹分析算法: 1. 基于密度的聚类算法: 基于密度的聚类
2024-09-26 10:42