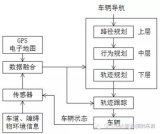
路径规划是智能车辆导航和控制的基础,是从轨迹决策的角度考虑的,可分为局部路径规划和全局路径规划。全局路径规划的任务是根据
2018-10-19 11:17
Lattice算法隶属于规划模块。规划模块以预测模块、Routing模块、高精地图和定位的结果作为输入,通过算法,输出一条平稳、舒适、安全的轨迹,交给控制模块去执行。我们可以看到,
2018-09-05 14:14
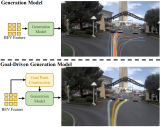
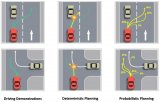
自动驾驶轨迹规划往往采用直接回归轨迹的方法,这种方式虽在测试中能取得不错的性能,可直接输出当前场景下最有可能的轨迹或控制,但它难以对自动驾驶场景中常见的多模态动作分布进
2025-03-18 17:59
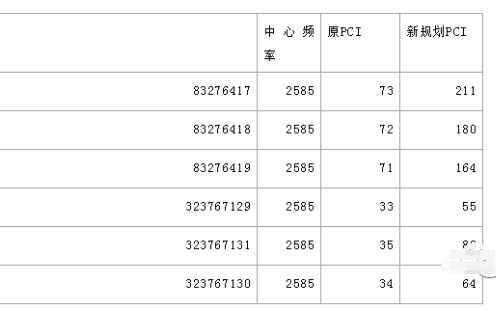
新规划PCI核查工具的使用方法和应用事例
2020-09-01 15:12
MLP回归出规划轨迹,无法应对环境信息和决策规划之间不明确的映射关系。同时基于神经网络输出的轨迹无法保证满足运动学约束,仍需要后端的
2024-02-22 10:21

本研究提出了ExTraCT框架,利用自然语言进行轨迹校正。该框架结合了大型语言模型(LLMs)用于自然语言理解和轨迹变形函数。ExTraCT能够根据场景在线生成轨迹修改特征及其自然语言描述,通过
2024-01-19 10:45

基于C3-370C的GPS定位及轨迹记录仪!
2014-09-29 20:13
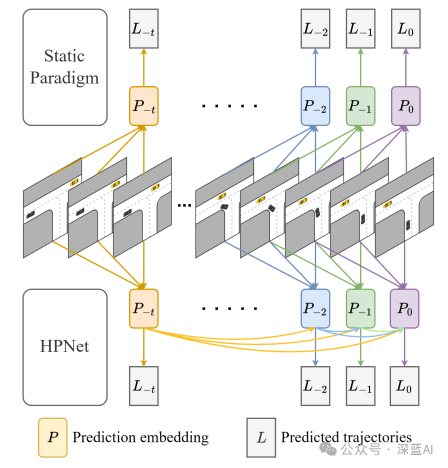
本文提出了一种动态轨迹预测方法,通过结合历史帧和历史预测结果来提高预测的稳定性和准确性。它引入了历史预测注意力模块,以编码连续预测之间的动态关系,并通过三重因子注意力模块实现了最先进的性能。本方法能够生成准确且稳定的未来轨迹,这对于自动驾驶系统落地至关重要。
2024-10-28 14:34
运动控制起源于早期的伺服控制,本文与读者分享的是运动控制的定义、运动控制系统的基本架构组成以及在运动控制方面几项运动所需控制轨迹等
2013-04-07 10:47
电网规划的重点是根据城乡总体规划、电源规划、新能源规划,充分考虑地区不同的发展定位和需求,研究和制定电网整体发展战略和目标网架,立足解决现有电网存在的问题、不断优化电网
2018-05-15 09:02