
本文提出了基于ARM7系列 LPC2210 微控制器和嵌入式操作系统 μC / OS—II 来实现 触摸屏 触摸点 数据采集系统 的设计,并完成了微控制器与上位机之间的物理层电路转换,实现了基于LIN总线的数据通信,能够在上位机得到触摸点的精确坐标以及控制菜单信息,并且准确可靠、传输速率高。
2018-04-01 11:01
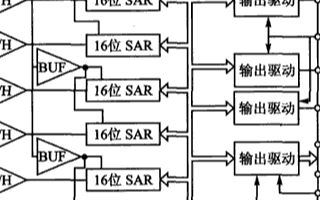
含有6个16位A/D转换器,具有转换精度高、速度快、功耗低、输入模拟信号幅度大、信噪比高等特点。Phmps公司出品的LPC2210,是一款工业级的ARM控制器,处理速度快,性能稳定,与AD7656共同组成的6通道数据采集系统能在很大程度上提高系统的信号采集和处理能力。
2021-03-20 09:25

随着人口的老龄化和社会福利制度的完善,导致劳动力成本的急剧上升,一些简单的重复性的体力劳动为服务机器人提供了广阔的市场。清洁机器人是服务机器人的一种,可以代替人进行清扫房间、车间、墙壁等。提出一种应用于室内的移动清洁机器人的设计方案。
2021-04-07 10:22
GPS是当前在导航系统中应用最广泛的定位技术之一,但GPS也有其自身的不足。例如,当GPS终端在建筑密集的地方或在高架桥底下等恶劣的地理位置时,定位信号比较容易丢失,往往难以获取有效的定位信息。由美国高通公司开发的GPSOne定位模块,提供的定位信号是基于网络与蜂窝的定位技术。即使在卫星信号不好的情况下,只要存在联通的网络信号,利用蜂窝定位技术,就可以较容易地获得定位信号。此信号可作为GPS信号丢失情况下的一种补偿信号。
2021-05-22 11:47
藍牙4.0无线传输链接將获得的数据发送到目标主机,使傳統鼠標脫離對桌面的依賴,只需輕揮手腕,即可實現懸空3D操作,隨意移動控制屏幕光標。
2015-08-17 10:06
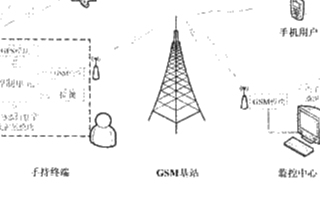
随着现代化科技的发展,人们对移动目标监控的要求越来越高。例如,地面目标跟踪及报警系统可协助家长实现对孩子的监控,孩子若遭遇走失或劫持事件,监控中心通过分析手持终端发送的GPS数据确定孩子所在位置,以采取相关安全措施。
2021-03-22 15:28
本文介绍了阻旋料位计的特点和工作原理。
2019-08-07 17:20
基本上,我们可以认为多旋翼飞行器的稳定性里,八旋翼》六旋翼》四旋翼。原因当然好解释,对于一个运动特性确定的飞行器来说,自然是能参与控制的量越多,越容易得到好的控制效果。
2018-05-24 00:13

相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标
2023-07-03 10:30

图8和图9分别显示了使用4层0.23 mm基板和2层0.17 mm基板封装不同尺寸芯片时的翘曲数值。这些翘曲数值是通过莫尔条纹投影仪(shadow moiré) 测量的平均值。根据业界惯例,正值翘曲表示翘
2018-08-14 15:50