为提高小型无人机的姿态角解算精度,降低姿态
2017-11-02 16:03
本无人机姿态角解算是基于FPGA的DSP核实现的,需要购买的请联系***。如果有需要也可以定制开发修改。
2016-12-01 16:54
基于STM32的四轴无人机的姿态解算与控制系统设计
2019-08-06 20:33
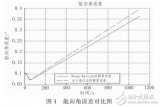
无人机求解姿态角有多种算法,但由于各种算法的自身限制及计算机计算速度的限制,所以我们需要选择一个较佳的求解
2018-07-04 14:35
了解或想开发无人机的朋友肯定绕不过姿态解算这茬,花点时间去了解它们原理并不难,这里提供两个原理链接供大家参考:四元数表示旋转的理解四旋翼
2022-01-11 07:06
姿态解算篇A基本知识1、如何实现控制一个无人机系统的算法主要有两类:姿态
2021-08-09 08:09
,提出双传感器融合算法.这样的的无人机的位置和姿态信息相对准确,通过协同作用,为pid算法提供相关电机调节参数。这些大概就是这一段时间的想法。
2016-12-30 18:03
无人机系统架构 三.飞控系统简介 导航飞控系统之导航子系统功能:向无人机提供位置,速度,飞行姿态,引导无人 机沿指定航线安全,准时,准确的飞行。 获得必要的导航要
2019-07-14 05:30
一、概述无人机求解姿态角有多种算法,但由于各种算法的自身限制及计算机计算速度的限制,所以我们需要选择一个较佳的求解
2019-06-11 08:30
改进PID的无人机飞行姿态角控制消颤算法_陆兴华
2017-03-19 11:41