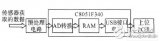
系统设计图如图1所示, 系统主要由C8051F340数据采集模块与上位PC机构成。需要监控的数据通过系统前端的传感器转换后送入预处理电路, 从预处理电路输出的数据通过I/O端口送入AD转换端口,经过AD转换将数据保存到C8051F340单片机, 最后通过USB把数
2018-08-03 10:12

本文以带有片上USB 控制器和D/A 转换器的高度集成处理器C8051F340为核心器件,采用SD 卡存储技术利用USB 总线、虚拟仪器实现软件LabVIEW 设计图形用户界面,设计一款低成本数据采集器。
2014-12-11 11:11

扫地机器人好用与否,避障表现首当其冲,那么评判避障好坏的标准又是什么?
2023-09-28 11:38
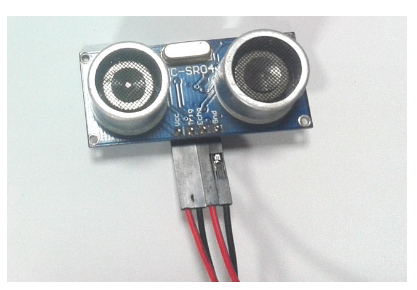
我们将使用超声波传感器和 Arduino 构建一个避障机器人。这里使用超声波传感器通过计算
2022-09-08 15:14
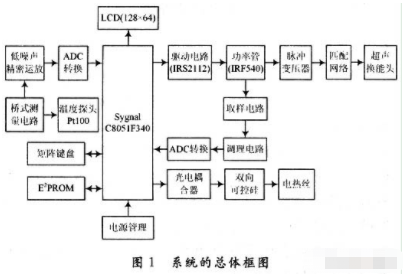
单片机作为智能控制芯片,在电子信息、自动控制的各个领域发挥着极其重要的作用。医疗仪器的设计和研制也越来越多应用单片机技术,使其朝着智能化,小型化方向发展。综合考虑各种因素,在此介绍了一种采用高性能单片机C8051F340作为核心控制芯片的输频率、强度等可调,可控恒温的低频
2021-04-14 11:32
实现避障与导航的必要条件是环境感知,在未知或者是部分未知的环境下避障需要通过传感器获取周围环境信息,包括障碍物的尺寸、形状和位置等信息,因此传感器技术在移动
2019-11-23 09:35

5STM32超声波测距STM32F103C8t6超声波避障小车
2024-08-15 16:25
的重要标志,而避障又是实现自主定位导航的基本,它是指机器人在行走时,通过传感器感知到在其路线规划上存在的静态或动态障碍物,按照相应算法进行路径实时更新,最终绕开障碍物到达目标点。那
2021-10-14 14:39
能够看到,市面上无论是石头、科沃斯、还是云鲸等头部厂商,其高端产品基本都是激光+视觉融合方案,并且基本支持智能避障,表现为机器人可对识别的不同障碍物信息,做出动态调整避
2023-09-27 17:30
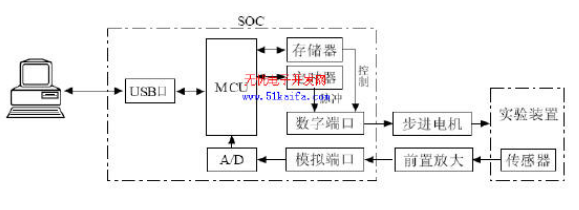
智能数据采集系统包括:步进电机控制、数据采集、数据传输、数据处理等部分(如图1 所示)。为了进一步提高系统的可靠性和降低成本,本文提出了采用片上系统(SOC)的解决方案——基于C8051F340
2019-05-06 15:29