倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理
2017-11-27 16:36

系统控制上得到实现,而且当一种新的控制理论和方法提出以后,在不能用理论加以严格证明时,可以考虑通过倒立摆装置来验证其正确
2020-05-03 10:29
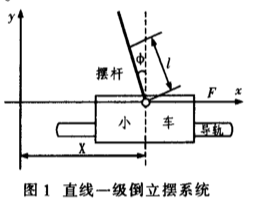
建立直线一级倒立摆的仿真模型如图3所示。“GLlIPState—Space”为直线一级倒立摆的状态空间模型。双击图3中的“Poles Control”模块,打开图4中的
2020-05-03 18:11
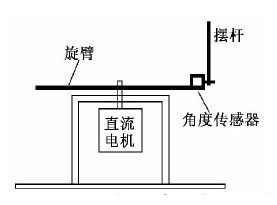
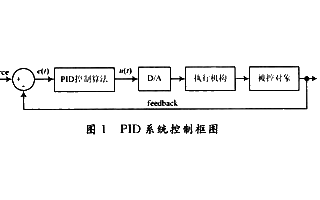
系统工作原理如下:摆杆摆动时,角度传感器检测摆杆的角度,根据角度传感器的输出特性,其输出电压经A/D转换器转换成电压数字量,该数字量与期望的值进行比较产生偏差,通过单片机对该偏差进行处理,即PID
2019-01-16 15:31
控制算法的极大丰富和微电子领域工艺技术及EDA工具的飞速发展,使得我们可以将两个领域的应用优势集合在一起,在EDA工具的帮助下便捷快速地在FPGA上可靠地实现各种新型算法,完成整个控制系统从行为算法级(
2020-04-25 17:32
风力摆系统是一种利用风力作为动力对物体进行位置控制的摆动装置控制系统。 在我国虽然目前还没有系统的成品的销售与应用,但这
2017-11-27 09:18

控制系统能实现数据采集、连续控制、间隙控制、顺序控制、逻辑运算、先进过程控制
2019-05-08 18:00
在工业自动化领域中,控制系统是确保生产过程稳定、高效运行的关键。其中,前馈控制系统和反馈控制系统是两种常见的控制策略。它们各自具有独特的工作原理和优势,适用于不同的应用
2024-06-17 11:45
在现代工业自动化领域中,伺服控制系统和变频控制系统作为两大关键技术,在提升生产效率、优化产品质量以及实现能源高效利用等方面发挥着至关重要的作用。然而,两者在原理、结构、性能特点以及应用领域等方面存在
2024-06-05 17:06
PLC控制系统与传统继电器控制有许多区别。PLC(可编程逻辑控制器)是一种工业自动化控制系统,它通过数字化计算机技术实现
2024-02-04 15:59