
介绍 一般意义上,相机姿态估计通常依赖于如手工的特征检测匹配、RANSAC和束调整(BA)。在本文中,作者提出了PoseDiffusion,这是一种新颖的相机姿态估计
2023-07-23 15:22

AR/VR体验需要由用户姿态的显式表征所驱动。特别地,其需要从设备的角度估计用户的姿态,这隐含地对应于以自我为中心的角度,亦即与用户3D头部和身体
2023-05-31 14:49
基于CAD模型的物体姿态估计:目前最先进的物体6DoF姿态估计方法可以大致分为回归和关键点技术。第一类
2022-08-10 11:42
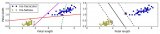
虚线表示的是那些决策函数等于 1 或 -1 的点:它们平行,且到决策边界的距离相等,形成一个间隔。训练线性 SVM 分类器意味着找到w值和b值使得这一个间隔尽可能大,同时避免间隔违规(硬间隔)或限制它们(软间隔)
2018-07-12 15:19

如前文所述,本文建立了三个估计器,在小侧向激励工况下,可通过基于动力学模型的估计器估计出侧向车速,进一步使用该侧向车速
2018-07-31 14:26
NeRF来应用无网格、纯RGB的6DoF姿态估计的分析合成法:给定一个图像,找到摄像机相对于三维物体或场景的平移和旋转。
2022-08-10 11:37

作者在官网指出,深度高分辨率网络不仅对姿态估计有效,也可以应用到计算机视觉的其他任务,诸如语义分割、人脸对齐、目标检测、图像分类中,期待更多具有说服力的结果公布。
2019-03-05 09:55
SVM可以做线性分类、非线性分类、线性回归等,相比逻辑回归、线性回归、决策树等模型。
2017-11-30 10:59
新系统采用 PyTorch 框架,在姿态估计(Pose Estimation)标准测试集COCO validation set上,达到 71mAP的精度(比 OpenPose 相对提升17
2018-09-08 09:11

从上述问题的角度出发,集成学习分为两类流派:Bagging与Boosting。Bagging(Bootstrap Aggregating)对训练数据擦用自助采样(boostrap sampling
2018-09-23 10:02