调节系统投自动:往往在控制方案确定好且判断出调节器的正/反作用后,最关键的是P、I、D参数如何整定,根据多年的现场工作经
2022-10-09 14:08
的核心在于通过调整比例(P)、积分(I)和微分(D)三个参数,实现对被控对象的精确控制。本文将详细探讨PID控制器中P、I
2024-06-05 15:30
PID控制中有P、I、D三个参数,只有明白这三个参数的含义和作用才能完成控制器PID参数整定,让
2022-09-27 15:27

SuperCAT是凌华科技打造的基于软件控制的EtherCAT运动控制器,其核心的控制软件来自于凌华二十多年运动
2024-01-09 11:57
MM32F5270 系列控制器支持 I2S 总线接口,本章节在接下来会对 MM32F5270 I2S进行介绍,并使用 M
2022-09-16 10:39
的偏差e和偏差变化率进行模糊逻辑决策(其依据模糊控制规则),应用模糊推理算法得出模糊控制器的模糊输出量;最后,解模糊化,即利用模糊控制规则在线清晰化得到精确值既为:PID控制器
2020-05-03 10:40
TC9012F是一种通用型红外遥控信号发送用的CMOS大规模集成电路,其为4位专用微控制器。
2018-06-07 09:40

仿真中模糊自整定控制器中KP,KI,KD三个待整定参数的初始值均为零。为使输入信号与模糊自整定控制器的论域相同,引入了幅
2020-04-06 10:44
一是理论计算整定法。它主要是依据系统的数学模型,经过理论计算确定控制器参数。这种方法所得到的计算数据未必可以直接用,还必须通过工程实际进行调整和修改。
2021-03-23 14:18
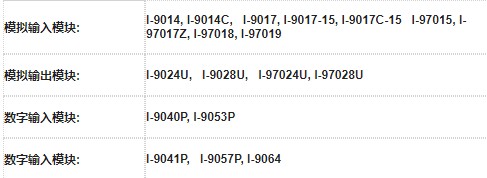
新产品上市: I-9K与I-97K系列I/O扩充模块,适用于XP-9000, WP-9000, LP-9000或LX-9000等系列可编程自动化控制器(PACs)。
2018-07-23 16:55