工业机器人关节转速不高。机器人关节角速度很低,可电机在极低的速度下转动是不平稳的,控制不易,需要一个机械让电机在较合理的转速下运
2018-06-01 14:54
在机器人系统中,为什么不能直接控制伺服电机转子转速控制关节运动,为何还需要减速器?
2019-05-09 16:13
本文首先介绍了红外传感器工作原理,其次介绍了红外传感器的种类,最后介绍了红外传感器的应用。
2019-09-17 08:58
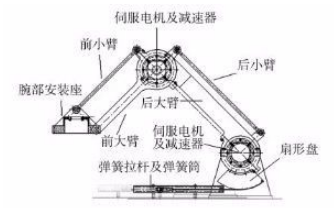
从上面的机器人臂部结构图中我们可以看到,在机器人关节处都安装有电机和减速机用来控制关节运动,那么问题来了:在
2019-02-15 15:13

在本项目中,我使用红外传感器来感知眼球运动并控制LED。
2022-04-07 17:30
现今工业机器人的先进程度让人叹为观止,尤其是那些灵动的5轴6轴机器人,具有如此多的关节,还能够做到运动和指令的精确传输,
2016-10-27 18:31
,因此,一般此运动类型运用在空间点上,并且在自动运行程序之前,必须低速检查一遍,观察工业机器人实际运动轨迹是否与周围设备有干涉。
2018-05-15 14:45
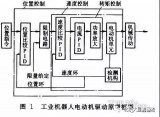
机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构。
2018-11-21 16:17
一般机器人系统由机械手、环境、任务和控制器四个互相作用的部分组成。我们称一般安装在机器人机械手上的传感器为内传感器(Inner Sensons),而称作为环境的一部分的
2017-03-06 10:25
