由第一节我们知道,熵是描述事物不确定性的指标。我们将熵的这一性质应用在信号检测领域,当信号包含了较强的随机噪声时或被噪声完全掩盖时,信号的随机性大大的增加了,其对应的熵也较大,根据这一原理对信号的质量进行检测,下图是
2019-04-13 10:45

可以看一下单目深度估计效果,这个深度图的分辨率是真的高,物体边界分割的非常干净!这里也推荐工坊推出的新课程《单目深度估计方法:算法梳理与代码实现》。
2023-12-17 10:01
早期的研究工作主要是通过改变高熵合金中元素数量类型,以及浓度来调控材料中的辐照缺陷行为。随着体系中化学复杂性的增加,虽然能一定程度上抑制辐照肿胀,但也会带来辐照硬化以及相不稳定。
2022-10-21 16:56

我的论文方向目前是使用单目摄像头实现机器人对人的跟随,首先单目摄像头与kinect等深度摄像头最大的区别是无法有效获取深度信息,那就首先从这方面入手,尝试通过图像获取摄像头与人的距离。
2023-07-03 10:01
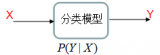
这篇小文将告诉你:Softmax是如何把CNN的输出转变成概率,以及交叉熵是如何为优化过程提供度量,为了让读者能够深入理解,我们将会用python一一实现他们。
2018-07-29 11:21
藍牙4.0无线传输链接將获得的数据发送到目标主机,使傳統鼠標脫離對桌面的依賴,只需輕揮手腕,即可實現懸空3D操作,隨意移動控制屏幕光標。
2015-08-17 10:06

双目匹配需要把左图像素和右图中其对应像素进行匹配,再由匹配的像素差算出左图像素对应的深度,而之前的单目深度估计方法均不能显式引入类似的几何约束。由于深度学习模型的引入,双目匹配算法的性能近年来得到了极大的提升。
2018-06-04 15:46

这一二元熵函数的图像如下图所示。当概率为p=1/2时,该函数达到其最大值,这意味着p(X=a)=0.5或类似的p(X=b)=0.5,即50%对50%的概率为a或b(不确定性最大)。当概率为p=1或p
2018-04-17 16:30
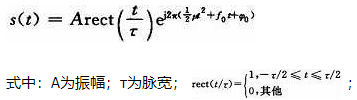
雷达系统在研制过程中,各部分往往是并行的,在调试信号处理分系统时,如果天线没做好,就得不到阵面送下来的回波数据,这时调试就无法正常进行。为了解决这一问题,往往先设计一个模目信号,把信号处理分系统调试好,待其他分系统也调试好后,再切换为正常接收模式,进行系统联试。
2021-06-26 14:40
