无功运行优化问题的关键在于获得最优解或较好的次优解。传统的线性规化法和非线性规化法不能很好地处理整型变量问题,而常规模拟退火算法(SA)的鲁棒性不高。结合高中压配
2009-07-11 18:52

如何规划机器人的运动方式是机器人开发领域的一大课题,本文分享GitHub的一个机器人技术中常用的路径
2023-10-21 09:36
a. 本栏路径规划利用矩阵(二维数组)来表示栅格地图(因为对于矩阵,无论MATLAB、C++还是Python,矩阵更适合数组的表达,更便于编程。)
2023-03-15 11:40
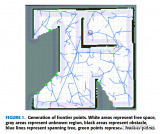
机器人对未知环境的自主探索是机器人智能化的关键技术。为了提高搜索效率,作者提出了一种基于边界点优化和多步路径规划的搜索策略。他们主要对边界点优化、边界点选择、
2023-06-19 10:19
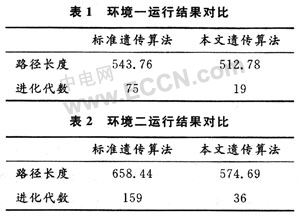
小生境遗传算法的移动机器人路径优化技术 移动机器人路径规划是机器人学的
2010-05-17 13:45
一名合格的扫地机器人,应该要有一套智能的清扫系统,它赋予了扫地机器人灵魂,让扫地机器人懂得思考,不再盲目乱扫乱撞,拒绝添堵!
2016-11-01 10:50
清洁消毒是阻断病毒传播的重要途径。 钛米智能消毒机器人系统:其消毒与传统方式不一样,钛米消毒机器人针对环境物表和空气进行自主移动式多点消毒,弥补传统固定式空气消毒机、紫外线灯管、及化学熏蒸法的不足,可以满足更高水
2020-03-18 09:01
协作机器人只是整个工业机器人产业链中一个非常重要的细分类别,有它独特的优势,但缺点也很明显:为了控制力和碰撞能力,协作机器人的运行速度比较慢,通常只有传统机器人的三分之
2019-07-07 09:47
转圈圈的扫地机器人并不能算做是机器人,只能算是执行某种固定程序的机械。Roomba是最早流行的扫地机器人,它的路径规划是
2018-01-05 16:27
要想解决机器人智能移动这个问题,除了要有SLAM技术之外,还需要加入路径规划和运动控制。在SLAM技术帮助机器人确定自身定位和构建地图之后,进行一个叫做目标点导航的能力
2018-08-26 10:04