众所周知,无人驾驶大致可以分为三个方面的工作:感知,决策及控制。
2022-11-08 11:13

本文主要介绍了基于STM32F103RBT6单片机的步行者航位推算装置的硬件设计与采用的软件算法,完成了对多传感器数据的采集和航迹推算。
2017-12-11 17:38

借着热点,简单聊聊 大模型的部署方案 ,作为一个只搞过CV部署的算法工程师,在最近LLM逐渐改变生活的大背景下,猛然意识到LLM部署也是很重要的。大模型很火,而且确实有用(很多垂类场景可以针对去
2023-05-23 15:08
如果对移动机器人视觉算法进行拆解,你就会发现获取物体深度信息、定位导航以及壁障等都是基于不同的视觉算法,本文就带大家聊一聊几种不同但又必不可少的视觉算法组成。
2018-09-18 14:32
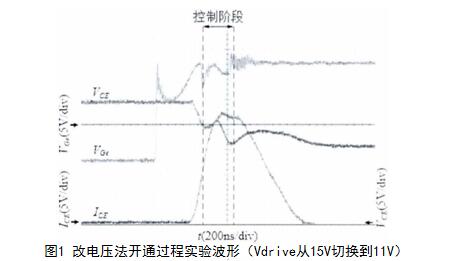
和改电阻法不同的是,改电压法是在控制阶段改变驱动电压来控制电压电流过冲。改驱动电压的方法大概有两种,一种是通过电阻分压实现改驱动电压,另外一种是在控制芯片(DSPFPG
2019-10-07 11:35
坏摄像头改工作灯
2018-08-21 11:33
移动机器人视觉的研究主要集中在颜色模型建立、目标识别、定位以及跟踪等方面。目标的实时识别与定位是足球机器人在足球赛中精确踢球的前提。文章主要是针对目前足球机器人在视觉系统上所存在的问题进行了颜色模型建立及目标定位算法的改进,加入了目标追踪
2016-09-19 11:18
遗传算法(Genetic Algorithm,GA)最早是由美国的 John holland于20世纪70年代提出,该算法是根据大自然中生物体进化规律而设计提出的。是模拟达尔文生物进化论的自然选择和遗传学机理的生物进化过程的计算模型,是一种通过模拟自然进化过程搜索
2021-03-07 13:39
本设计是基于STM32F4的四轴航拍平台。以STM32F407为控制核心,四轴飞行器为载体,辅以云台的航拍系统。硬件上由飞控电路,电源管理,通信模块,动力系统,机架,云台伺服系统组成。算法上采用简洁
2017-11-29 17:08
自主定位是扫地机器人自主路径规划的基础。经过多年的研究,虽然受成本、生产等因素的制约,航位推算法仍然是目前采用最广泛的定位方法,但通过算法优化,利用混合定位,可以减小其
2016-11-23 15:06