
视觉匹配是关键计算机视觉任务中的关键步骤,包括摄像机定位、图像配准和运动结构。目前最有效的匹配关键点的技术包括使用经过学习的稀疏或密集匹配器,这需要成对的图像。这些神经
2024-10-28 09:57
算法,以及基于深度学习的图像区域匹配等。 分类: 局部不变特征点匹配、直
2020-12-26 11:08
视频中提取出具有独特性质的特征点,这些特征点可以代表图像中的关键信息。这些特征点
2023-06-16 16:48
我们习惯从图像中选取比较有代表性的点,然后,在此基础上,讨论相机位姿估计问题,以及这些点的定位问题。 在经典 SLAM 模型中,把它们称为路标,而在视觉 SLAM 中,路标则是指图像特征(Features)。
2024-04-19 11:41

在一对图像中寻找匹配的像素是具有各种应用的基本计算机视觉任务。由于光流估计和局部特征匹配等不同任务的特定要求,以前的工作主要分为稠密
2023-11-27 11:32

、形状特征以及局部特征点等。其中局部特点具有很好的稳定性,不容易受外界环境的干扰,本篇文章也是对这方面知识的一个总结。
2021-09-01 10:19
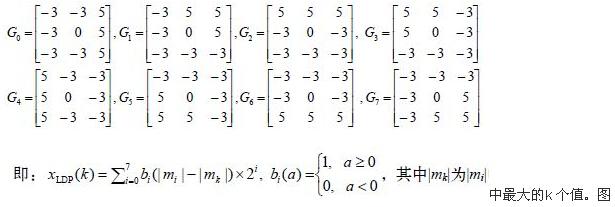
LDP 算法是将与Kirsch 算子运算后得到的一些负值的邻域灰度值作为中心灰度值的编码因子,这将会导致中心灰度值不能很好的反映邻域局部特征信息,从而降低识别率。针对于此,本文提出了一种改进的
2018-09-19 08:03

图像特征 传统的图像特征提取(特征工程)主要是基于各种先验模型,通过提取图像关键点、生成描述子特征数据、进行数据
2021-04-30 09:11

图像特征 传统的图像特征提取(特征工程)主要是基于各种先验模型,通过提取图像关键点、生成描述子特征数据、进行数据
2021-05-20 10:49

识别系统主要由三个部分组成阶段:三维关键点检测,局部表面特征描述和表面匹配。在3D关键点检测阶段,三维点具有丰富的信息内容被确定为关键
2021-04-18 10:52