
视觉匹配是关键计算机视觉任务中的关键步骤,包括摄像机定位、图像配准和运动结构。目前最有效的匹配关键点的技术包括使用经过学习的稀疏或密集匹配器,这需要成对的图像。这些神经
2024-10-28 09:57
视频中提取出具有独特性质的特征点,这些特征点可以代表图像中的关键信息。这些特征点
2023-06-16 16:48
我们习惯从图像中选取比较有代表性的点,然后,在此基础上,讨论相机位姿估计问题,以及这些点的定位问题。 在经典 SLAM 模型中,把它们称为路标,而在视觉 SLAM 中,路标则是指图像特征(Features)。
2024-04-19 11:41

在一对图像中寻找匹配的像素是具有各种应用的基本计算机视觉任务。由于光流估计和局部特征匹配等不同任务的特定要求,以前的工作主要分为稠密
2023-11-27 11:32
我们都知道特征检测和匹配是计算机视觉领域中的重要任务,它们在许多应用中发挥着关键作用,比如SLAM、SFM、AR、VR等许多算法都需要稳定精确的特征检测和匹配。
2023-06-19 11:27
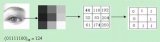
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变
2018-01-30 10:49
在局部匹配中,我们引入了一个新的空间,现在需要想方法,每个变换中找到一个最优的变换矩阵,使得场景点云中落在模型点云表面的特征点
2022-10-28 14:16
后面计算的是特征点主方向上的描述子,计算过程中要将特征点周围像素旋转到主方向上,因此计算一个半径为16的圆的近似坐标,用于后面计算描述子时进行旋转操作.
2022-10-14 09:50
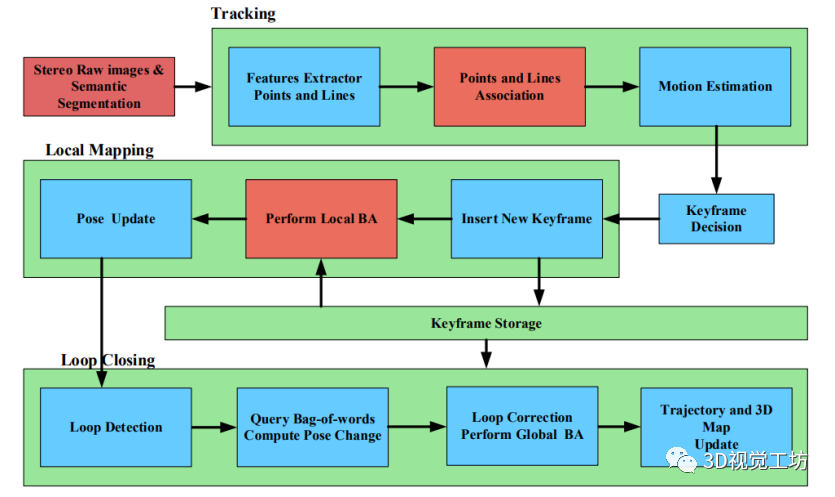
能导致线段数据的不正确关联,从而将误差引入系统并加剧系统的累积误差。针对这一问题,本文提出了一种结合语义不变量的点线立体视觉SLAM系统。该系统通过融合线特征和图像语义不变信息,提高了线
2023-09-01 17:16

本文提出了一种稳健的单目视觉SLAM系统,该系统同时利用点、线和消失点特征来进行精确的相机位姿估计和地图构建,有效解决了传统基于点特征的SLAM的局限性。
2025-03-21 17:07