
理论应用到非线性系统的扩展卡尔曼算法 Extended Kalman Filter(EKF)[2]。相比于线性卡尔曼滤波器
2022-08-12 10:06
在某社交平台,一篇题为“自主移动机器人真的需要SLAM吗“的问答,引起了大家的热议。 有人认为机器人确实是需要SLAM的,但目前流行的
2019-12-13 13:47
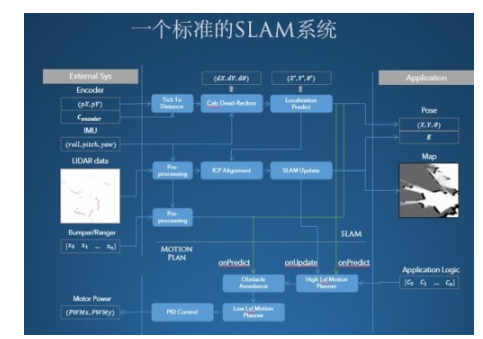
自主导航是移动机器人自动运行的一种关键技术,目前最主流的导航技术是SLAM(simultaneous localization and mapping)的方式,中文意思是”即时定位与地图构建“,其
2020-07-28 11:26
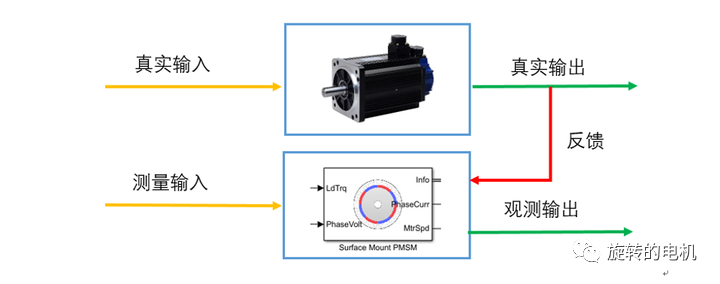
本章节采用扩展卡尔曼滤波进行永磁同步电机的无传感器控制,首先分析了扩展卡尔曼
2023-06-08 14:42
随着计算机的应用和传感技术的发展,移动机器人研究又出现了新的高潮。
2019-07-08 09:45
移动机器人是机器人的重要研究领域,人们很早就开始移动机器人的研究。
2016-08-05 13:27
机器狗、停车AGV、激光slam叉车……,11月新品缤纷! 腾讯——四足移动机器人平衡轮式移动机器人11月20日,腾讯Jamoca四足
2020-12-09 18:20
移动机器人的定位和地图创建是自主移动机器人领域的热点研究问题。对于已知环境中的机器人自主定位和已知机器人位置的地图创建已
2017-11-10 14:49
传感器的集成,但是要想最大限度降低导航制作成本,只能实现机器人底盘部件的模块化运作。移动机器人底盘承载着机器人定位、导航、移动
2021-06-16 17:12
