
理论应用到非线性系统的扩展卡尔曼算法 Extended Kalman Filter(EKF)[2]。相比于线性卡尔曼滤波器
2022-08-12 10:06
随着计算机的应用和传感技术的发展,移动机器人研究又出现了新的高潮。
2019-07-08 09:45
移动机器人的定位和地图创建是自主移动机器人领域的热点研究问题。对于已知环境中的机器人自主定位和已知机器人位置的地图创建已
2017-11-10 14:49

移动式机器人的控制系统的作用是生成控制信息,控制机器人的执行机构进行运动。跟踪设定轨迹是设计移动机器人的一项重要任务,其工作过程根据设定好的路线转为运动控制信号传输给
2019-06-12 14:49
我觉得现在是时候讨论一些更有趣的话题,今天的话题是介绍工业机器人、协作机器人和移动机器人。
2018-08-31 09:01
卡尔曼滤波器是一种基础预测定位算法。原理非常简单易懂。
2022-03-21 13:47

我们前一篇关于人物识别跟踪的文章《视频连续目标跟踪实现的两种方法和示例(更新)》里讲到,视频图像中物体的识别和跟踪用到了卡尔曼滤波器(KF)。这里对这个话题我们稍微对这个卡尔
2024-11-04 11:36

本文对于扩展卡尔曼滤波、无迹卡尔曼滤波仅仅做了一些简要介绍,不再想上次的
2024-01-14 14:29
一般而言,移动机器人的移动机构主要有轮式移动机构、履带式移动机构及足式移动机构,此外还有步进式
2018-11-27 15:47
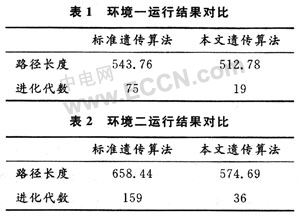
小生境遗传算法的移动机器人路径优化技术 移动机器人路径规划是机器人学的一个重要研究领域,也是人工智能与机器人学的一个结
2010-05-17 13:45