一种基于图像分割和立体视觉相结合的障碍物检测方法。通过分割提取出了障碍物的大致形体并滤去地面上的冗余信息,这样就把立体视觉
2010-10-18 16:08
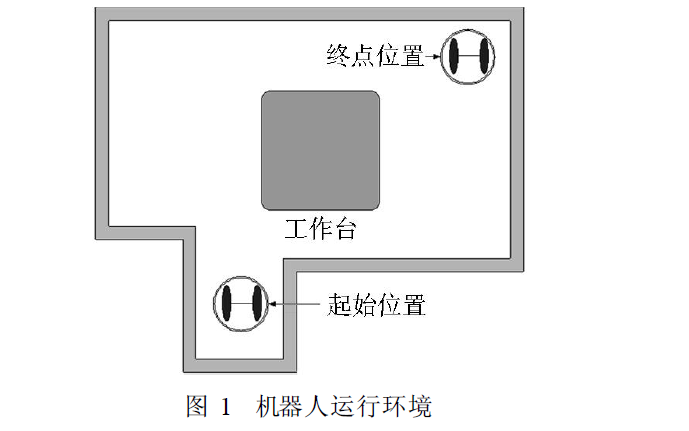
移动机器人利用导航技术,获得机器人的目前所处的位置,结合传感器技术对周围外界环境(障碍物等)作实时探测,并根据环境提供的信息规划一条可行路径完成达到目标点的任务。移动机器人
2020-11-23 15:08
移动机器人的障碍物群检测方法!资料来源网络,如有侵权,敬请原谅!
2015-12-25 09:49
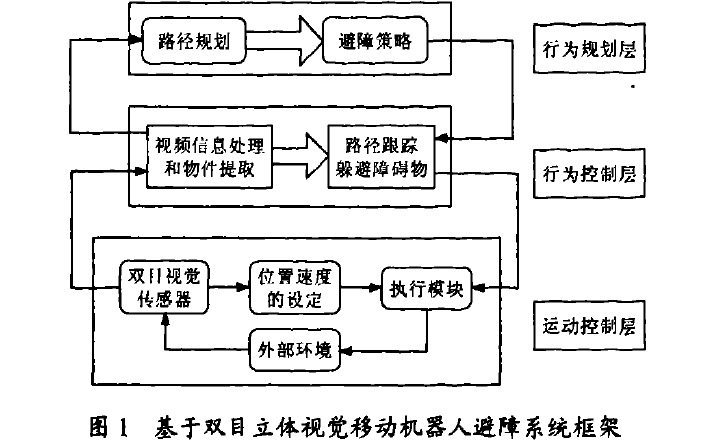
提出了一种移动机器人路径规划和避障的系统设计方案,实现了移动机器人自主行进的路径规划和自动避障功能.详细说明了如何采用立体视觉实现对环境的探测,利用图像处理算法的组合分离出地面、背景、
2019-08-29 17:03
基于双目视觉伺服反馈的非完整移动机器人轨迹跟踪_王宝磊
2017-03-16 09:17
针对移动机器人的局部视觉定位问题进行了研究。首先通过移动机器人视觉定位与目标跟踪系统求出目标质心特征点的位置时间序列,
2019-06-01 08:00
LabView For MyRIO。myRIO组件包中有机器视觉处理模块,多轴联动插补运动解算模块,移动机器人Robotic开发包,内部有全向轮运动解算模块,移动机器人
2016-08-21 12:20
针对轮式移动机器人运动过程中避免碰撞固定障碍物的问题, 提出了一种基于预先检测位置的智能控制算法。该算法以障碍物边预先检测
2019-10-29 17:04
接触了移动机器人这么久,我觉得应该写点什么东西,分享一下最基础的自己关于移动机器人的理解,也作为笔记总结,留到以后查阅。目前我还是觉得自己刚入门,有时候总想的太多,不如实践来的更直接,下面总结之前
2021-08-06 06:13
我觉得现在是时候讨论一些更有趣的话题,今天的话题是介绍工业机器人、协作机器人和移动机器人。我想每个人都知道机器人是什么。机器人
2018-10-30 11:33