二级倒立摆的模糊控制研究 1 引言 在控制理论发展的过程中,某一理论的正确性
2009-12-23 09:53

系统控制上得到实现,而且当一种新的控制理论和方法提出以后,在不能用理论加以严格证明时,可以考虑通过倒立摆装置来验证其正确
2020-05-03 10:29

引言 倒立摆系统在控制理论研究中是一种较为理想的实验装置。倒立摆系统
2009-01-01 21:05
倒立摆控制系统(InvertedPendulumSystem简称IPS)是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种
2017-11-27 16:36
概述 倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。对
2010-08-05 15:26
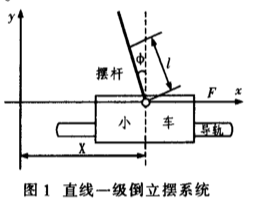
系统工作原理如下:摆杆摆动时,角度传感器检测摆杆的角度,根据角度传感器的输出特性,其输出电压经A/D转换器转换成电压数字量,该数字量与期望的值进行比较产生偏差,通过单片机对该偏差进行处理,即PID
2019-01-16 15:31

自动起摆控制器Swing-up Controller能够控制直线一级倒立摆
2019-08-23 08:05
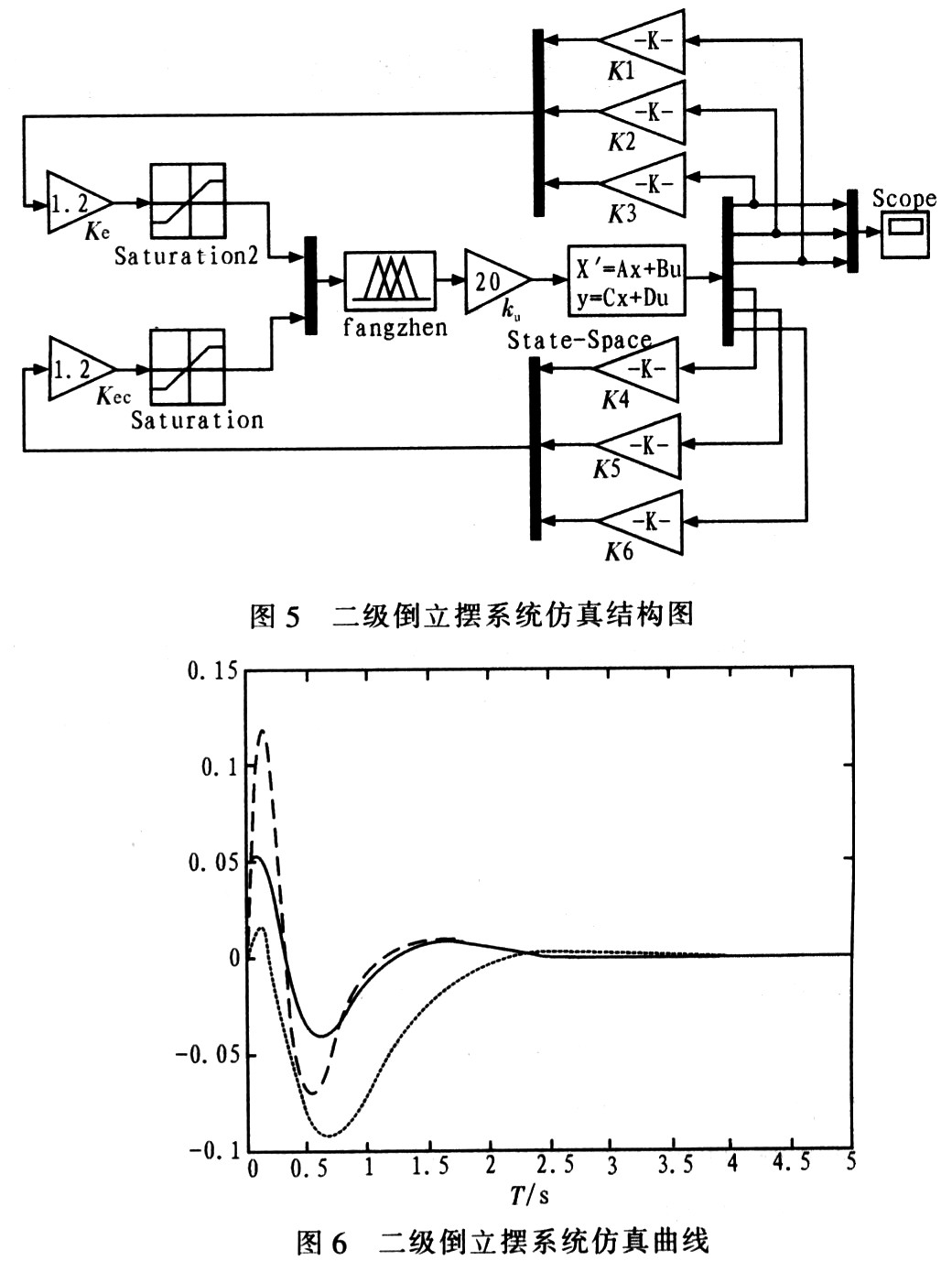
建立直线一级倒立摆的仿真模型如图3所示。“GLlIPState—Space”为直线一级倒立
2020-05-03 18:11
51系列单片机有5个中断源,2个优先级,可以实现二级中断服务嵌套结构。
2018-05-29 14:07
本文利用拉格朗日方程建立了直线一级倒立摆控制系统的数学模型,在此基础上分析了该系统的性能,并利用LQR控制器进行
2011-03-31 10:38