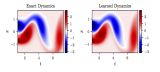
规律,而且能够学习到数学方程描述的物理定律。与纯数据驱动的神经网络学习相比,PINN在训练过程中施加了物理信息约束,因而能用更少的数据样本学习到更具泛化能力的模型。本文主要解析这种神经网络以及相关应用。
2023-09-24 15:36
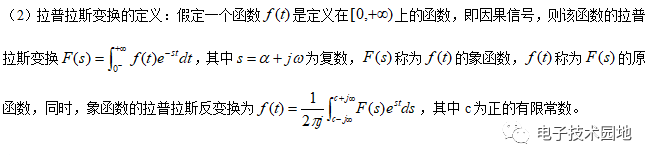
所以对于高阶系统,一般采用积分变换法,将时域函数变为频域函数,从而将时域微分方程转为频域代数方程求解,求出频域解后在还原为时域解
2023-03-02 14:19
导弹在大攻角飞行过程中,通道间存在严重的气动耦合。工程设计上,通常把较小的耦合项作为随机干扰来处理,但当耦合影响较大时,容易使控制系统丧失稳定性,因此必须考虑通道间的耦合效应,并对其
2020-05-17 10:35
TensorFlow 不仅仅可以用于机器学习。在此教程中,我们所举的例子(较为寻常)是使用 TensorFlow 模拟偏微分方程的行为(https://en.wikipedia.org/wiki/Partial_differential_equation)。我们将
2018-12-06 14:07

本文要点文丘里效应方程实际上意味着什么?在哪里可以观察到文丘里效应?如何在CFD中更好地实现文丘里效应?人们常说,数学是通用语言。这一论断的依据可能是:物理现象和理论概念可以用符号和方程来呈现。我们
2025-02-28 18:08 深圳(耀创)电子科技有限公司 企业号

当三相输入电压不平衡时,在静止坐标系下进行分析,一般都忽略了电流的解耦,应用传统比例谐振控制器时存在一个问题,即有功功率与无功功率的耦合严重。针对不平衡电网工况下PWM
2024-07-23 14:40

本文主要介绍了mpu6050姿态解算原理分析及程序设计,MPU6050硬件DMP解算姿态是非常简单的,四元数法只求解四个未知量的线性微分方程组,计算量小,易于操作,是比较实用的工程方法。
2017-12-11 13:51

相机的成像过程涉及到四个坐标系:世界坐标系、相机坐标系、图像坐标系、像素坐标系。这篇博客介绍相机的成像过程,以及四个坐标
2023-07-03 10:30
栅双极型晶体管)作为电机控制器中的核心元件,其重要性不言而喻。本文将对IGBT在电机控制器中的作用进行详细的阐述,包括I
2024-06-04 16:00
伺服定位控制可以在PLC中实现,也可以在伺服控制器中实现。用PLC实现,
2018-02-01 15:17