mpu6050姿态解算,内部DMP输出。上位机为匿名的上位机。
2015-06-14 17:15
哪位大神能帮我解答一下,四轴姿态解算误差修正的原理啊?误差为什么是加速度计与地磁计从地理坐标系转换到机体坐标系,两个坐标
2019-06-12 01:52
2015-06-01 15:59
2015-08-07 14:04
2015-07-27 15:04
姿态结算的KPKI一直调不好,太小的话反应慢,还达不到要求,比如pit偏60度,到不了60度。调的太大,KP=5.0,发现出现这种情况。所以有人能告诉我调节的方法或者自己调节出现问题怎么解决的吗?谢谢各位前辈了。
2019-05-29 01:07
1 为什么用加速度计的本次测量值和陀螺仪的上次值做叉乘?
2019-06-24 04:37
) 并且兼容MPU 6515。其完美的I2C方案,可直接输出9轴的全部数据。因此它也是四轴姿态解
2022-01-19 07:02
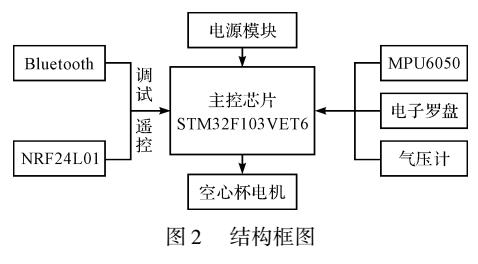
针对四轴飞行器姿态信息的实时准确获取问题,对四轴飞行器的姿态
2018-03-08 09:19
MPU6050有软件解算姿态和DMP解算姿态,他们各自的优缺点是什么呢?
2019-05-29 04:36