四旋翼飞行器的软件核心包括两大部分:姿态融合算法和控制算法;硬件核心便是MCU和传感器。
2019-10-25 10:07

本文主要介绍了基于STM32的四旋翼飞行姿态串级控制的设计与实现,行器控制器通过处理微型MEMS惯性器件和三维地磁传感器采集的数据,计算飞行器的姿态角,并根据飞行指令,结合相应的控制律给出适当的控制信号,控制飞行器姿
2017-12-23 15:24
以前,搞无人机的十个人有八个是航空、气动、机械出身,更多考虑的是如何让飞机稳定飞起来、飞得更快、飞得更高。如今,随着芯片、人工智能、大数据技术的发展,无人机开始了智能化、终端化、集群化的趋势,大批自动化、机械电子、信息工程、微电子的专业人材投入到了无人机研发大潮中,几年的时间让无人机从远离人们视野的军事应用飞入了寻常百姓家、让门外汉可以短暂的学习也能稳定可靠的飞行娱乐。不可否认,飞控技术的发展是这十年无人机变化的最大推手。
2023-12-03 10:42

控制模块可以分为控制逻辑和控制算法两大部分,逻辑用于处理各种输入输出的选择、切换等,算法是输入输出具体关系的数学表示。
2024-02-20 10:43
四轴飞行器不但实现了直升机的垂直升降的飞行性能,同时也在一定程度上降低了飞行器机械结构的设计难度。
2022-10-26 09:31
基本上,我们可以认为多旋翼飞行器的稳定性里,八旋翼》六旋翼》
2018-05-24 00:13
四轴飞行器又称四旋翼飞行器、四旋
2018-03-27 18:50
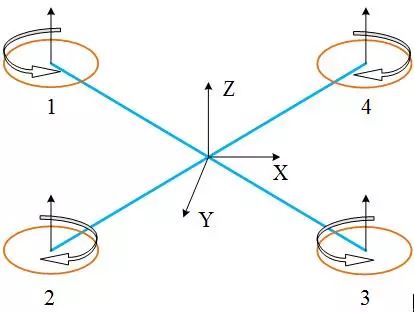
多旋翼飞行器是通过调节多个电机转速来改变螺旋桨转速,实现升力的变化,进而达到飞行姿态控制的目的。以四旋翼飞行器为例,飞行
2020-01-24 13:44
四轴飞行器又称四旋翼飞行器、四旋
2017-11-19 15:14
旋翼和轮子一样,是一项神奇的发明。 四旋翼无人机更是化作了航拍机,满足了许多普通人关于天空的想象。
2018-02-23 07:57