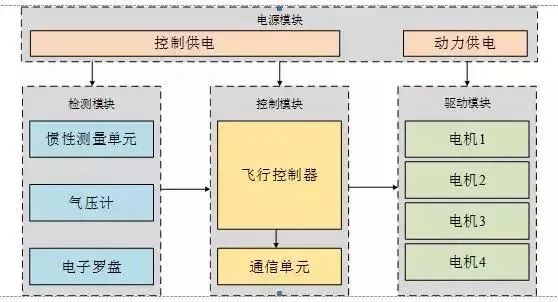
四旋翼飞行器的软件核心包括两大部分:姿态融合算法和控制算法;硬件核心便是MCU和传感器。
2019-10-25 10:07

无人飞行器自主飞行技术多年来一直是航空领域研究的热点,并且在实际应用中存在大量的需求,主要优点包括:系统制造成本低,在执行任务时人员伤害小,具有优良的操控性和灵活性等。而旋
2018-01-29 07:08
多旋翼飞行器的安全问题一直伴随着多旋翼飞行器。尤其是对于
2022-10-24 09:56
基本上,我们可以认为多旋翼飞行器的稳定性里,八旋翼》六旋
2018-05-24 00:13
多旋翼飞行器飞行操控品质评价体系研究对于多旋
2020-10-23 15:22
,可编程的四旋翼无人机更是受到许多中小学生的追捧。下面,我们一起来了解一下四旋翼
2021-12-01 14:05
多旋翼飞行器是通过调节多个电机转速来改变螺旋桨转速,实现升力的变化,进而达到飞行姿态控制的目的。以四
2020-01-24 13:44

本文主要介绍了基于STM32的四旋翼飞行姿态串级控制的设计与实现,行器控制器
2017-12-23 15:24

四旋翼无人机是一种具有4个旋翼的飞行器,有X型分布和十字型分布2种。文中
2020-04-19 08:02
用。于是,人们又花了一些年的时间研究MEMS去噪声的各种数学算法。这些算法以及自动控制器本身通常需要速度比较快的单片机来运行,于是人们又等了一些年时间,等速度比较快的单片机诞生。接着人们再花了若干年的时间理解多旋
2018-06-18 13:12