四旋翼飞行器的动力学建模及PID
2015-06-20 17:05
四旋翼飞行器的动力学建模及PID
2017-04-02 14:00
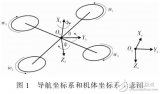
重力和螺旋桨拉力5、螺旋桨1、3为逆时针转动,螺旋桨2、4为顺时针转动多旋翼建模流程图一、动力单元模型二、控制效率模型CT是螺旋桨拉力系数,CM是螺旋桨转矩系数。三、刚
2021-09-15 07:22
项目名称:基于PID控制的四旋翼飞行器仿真研究及实验分析 试用计划:一、
2018-10-24 17:24
的离散状态方程和量测方 程,实现了对控制器所需状态变量的估计,并通过仿真实验验证了该方法的有效性。 本文仅对微小型四旋翼无人直升机的
2013-11-28 09:29
本文针对四旋翼飞行仿真器系统的非线性,采用RBF-ARX 模型对四旋
2009-12-16 14:12
跪求四旋翼飞机PID控制以及姿态控制算法等MATLAB仿真资料,谢谢
2015-07-17 11:33
高精度运动捕捉系统对四旋翼飞行器控制算法的研究具有重要意义。针对传统PID
2017-11-02 11:48
的结构形式,建立非线性数学模型。通过引入四个控制量,把非线性模型分解并线性化,得出悬停状态下四旋翼飞行
2019-04-05 07:00
复杂,不易操作等原因,四旋翼飞行器的发展一直都比较缓慢。直到20世纪90年代之后,随着微机电系统(MEMS)和微惯性(MIMU)以及飞行
2021-08-06 08:22