
在介绍以下内容之前,我们假设读者已经对复数与2D旋转、3D空间中的旋转、四元数的性质以及四元
2023-08-07 09:57
最近在研究小四轴的飞行,姿态检测主要用到的传感器是MPU6050。从MPU6050读出来的加速度和角速度数据最后要转成姿态,可以转换成欧拉角(偏航角、俯仰角和滚转角)或四元数表示,为了减少计算量(欧拉角涉及正弦运算,
2017-11-07 10:39

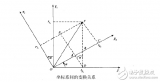
欧拉定理是刚体定点转动理论中的一个重要定理,它表明刚体绕固定点的任何位移都可以通过绕通过此点的某一轴转过一个角度来实现。
2023-07-17 10:34
MPU-6000(6050)为全球首例整合性6轴运动处理组件,相较于多组件方案,免除了组合陀螺仪与加速器时间轴之差的问题,减少了大量的封装空间。运动感测游戏 现实增强 电子稳像光学稳像行人导航器 “零触控”手势用户接口 姿势快捷方式 认证
2017-11-29 11:49
姿态规划在机械臂控制中占有重要的地位,在编程操作时需要应用姿态变换平滑性的插值算法确保机械臂工具动作的柔和度。
2023-12-27 17:13
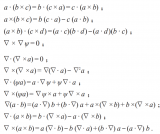
上表中的a,b,c,以及x,是vector。一般《电-动力学》教科书里都会列这个表,我猜是为了方便读者查找。那为什么要方便查找呢?当然是因为就知道你不明白也记不住啊!这大概是一般《电-动力学》教科书作者的预设立场。
2020-11-20 14:43
无人机求解姿态角有多种算法,但由于各种算法的自身限制及计算机计算速度的限制,所以我们需要选择一个较佳的求解算法
2018-07-04 14:35
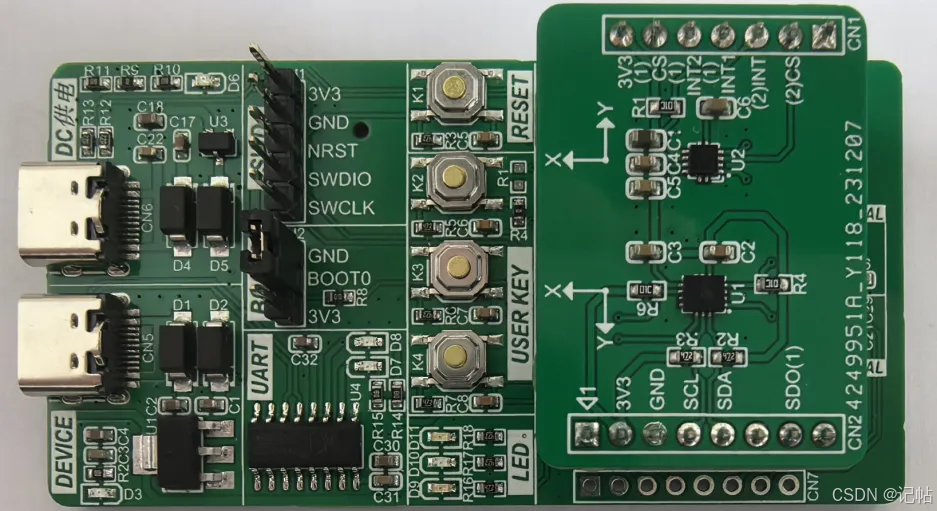
本文将介绍如何通过中断机制获取 LSM6DSV16X 传感器的 SFLP(Sensor Fusion Low Power)四元数数据。LSM6DSV16X 是一款高性能的 6 轴惯性传感器,支持
2024-11-25 11:44

LSM6DSV16X 特性涉及到的是一种低功耗的传感器融合算法(Sensor Fusion Low Power, SFLP). 低功耗传感器融合(SFLP)算法:
2023-12-18 10:53
估计四元数,然后利用互补滤波算法对陀螺仪的漂移进行补偿得到校正后的四元数
2018-05-02 08:27