四元数,三轴陀螺仪,三轴加速度计。程序算法。
2016-03-14 10:32
基于单位四元数的ICP改进算法_杨秋翔
2017-01-03 17:41
本文采用四元数进行姿态变换,Kal-man滤波器进行数据融合,在低成本的ARM平台和MEMS传感器上实现了多传感器数据融合算法,解算出空间全角度的姿态角。实验结果表明测量误差在±0.2°范围内,能够满足一定范围内的测
2017-11-23 10:42
四元数转化为欧拉角: 1. 初始姿态的四元数(w,x,y,z)=(1,
2019-12-05 17:03
MPU的旋转矩阵 四元数 欧拉角比较,能够帮助新手了解三者的不同之处
2015-12-08 11:41

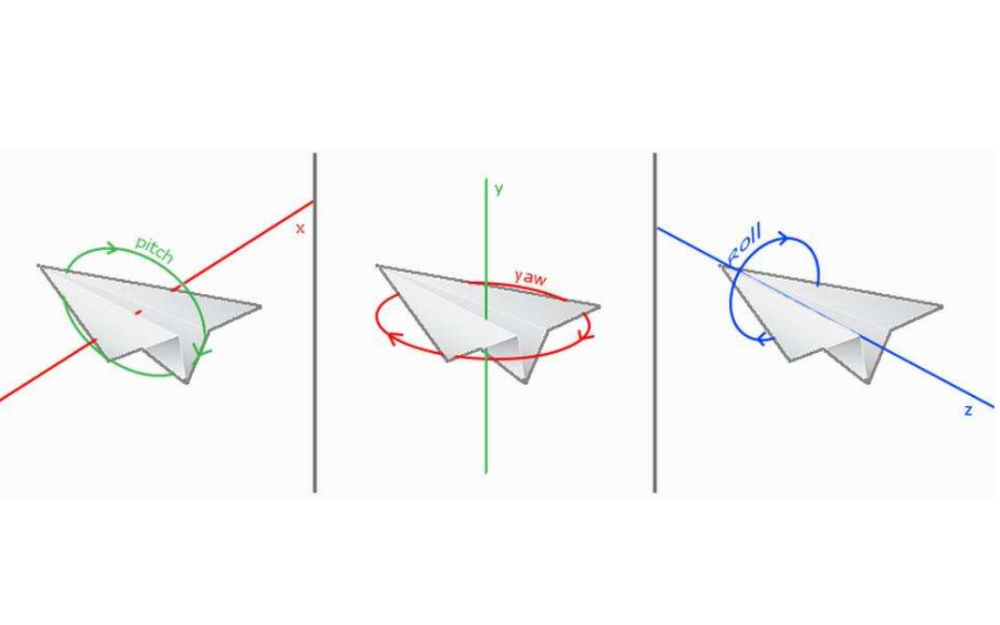
使用MPU6050硬件DMP解算姿态是非常简单的,下面介绍由三轴陀螺仪和加速度计的值来使用四元数软件解算姿态的方法。我们先来看看如何用欧拉角描述一次平面旋转(坐标变换):MPU6050的
2021-12-06 12:36
基于四元数的球面太阳跟踪装置位置反解_阳波
2017-03-16 09:27
四元数法在4R机器人位置分析中的应用_杨爱民
2017-03-14 08:00

本文档的主要内容详细介绍的是MPU6050传感器的四元数欧拉角程序免费下载。
2019-08-30 17:29
本文档的主要内容详细介绍的是四元数姿态更新方法公示版C语言版免费下载。
2020-05-21 08:00