
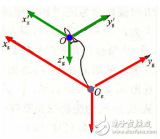
在介绍以下内容之前,我们假设读者已经对复数与2D旋转、3D空间中的旋转、四元数的性质以及四元
2023-08-07 09:57

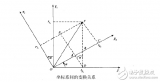
首先要指出的是,Mahony算法假设加速度计测量的加速度完全由重力提供,即物体本体运动产生的加速度可忽略不计。在这一假设下,我们假设当前时刻机体的姿态为,则将重力向量的表示转到机体坐标系下,应该为:,这里表示四元
2023-05-22 09:18
最近在研究小四轴的飞行,姿态检测主要用到的传感器是MPU6050。从MPU6050读出来的加速度和角速度数据最后要转成姿态,可以转换成欧拉角(偏航角、俯仰角和滚转角)或四元数表示,为了减少计算量(欧拉角涉及正弦运算,
2017-11-07 10:39
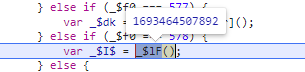
上述文章中,详细介绍了瑞数的特征、如何区分不同版本、瑞数的代码结构以及各自的作用,本文就不再赘述了,不了解的同志可以先去看看之前的文章。 逆向目标 目标:瑞数 6 代
2023-11-02 11:08
介绍了mpu6050姿态融合原理及程序代码分析,MPU6050是一款姿态传感器。主要介绍三种姿态融合算法:四元数法、一阶
2017-12-11 13:31
C语言中随机数的生成完整代码:
2019-02-20 09:21
最近读者群里有个读者跟我私信,说去面试微软遇到了一系列和数学相关的算法题,直接懵圈了。我看了下题目,发现这些题其实就是 LeetCode 上面「丑数」系列问题的修改版。
2022-09-14 11:40

LSM6DSV16X 特性涉及到的是一种低功耗的传感器融合算法(Sensor Fusion Low Power, SFLP). 低功耗传感器融合(SFLP)算法:
2023-12-18 10:53
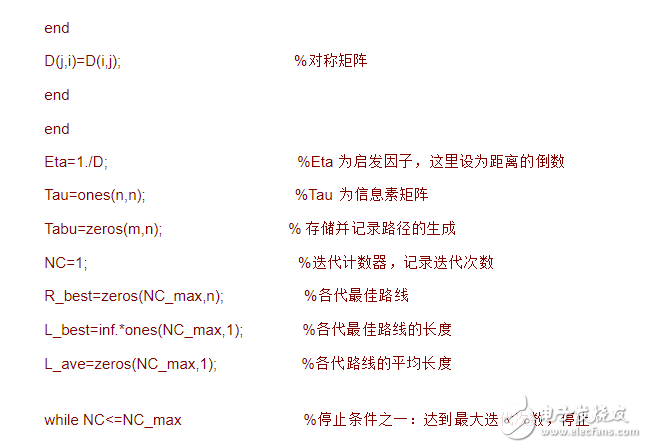
本文详细解析了关于蚁群算法matlab程序代码,具体步骤请看下文。
2018-02-02 10:21

算法是一个程序和软件的灵魂,作为一名优秀的程序员,只有对一些基础的算法有着全面的掌握,才会在设计程序和编写代码的过程中显得得心应手。
2019-05-13 14:40